Федеральное государственное
образовательное учреждение
высшего профессионального образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
Институт цветных металлов и материаловедения
Кафедра автоматизации производственных процессов
ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ
принципа максимума Понтрягина
Преподаватель В.А. Осипова
Студент МФ 07-08 А.А. Аврамчук
Красноярск 2010
Цель работы: необходимо за конечное время tk перевести объект из начального состояние
в конечное
таким образом, чтобы энергия затраченная управляющим устройством была минимальная, то есть
![]() .
.
Исходные данные:
Критерий
![]()
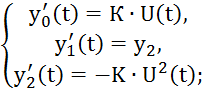
дифференциальное уравнение
ограничения
![]()
Из данного дифференциального уравнения составим систему линейных дифференциальных уравнений первого порядка.
Введем обозначения
![]()
где Хвх(t) = U(t).
в полученную систему вводим
![]()
где
Дополним полученную систему еще одним уравнением
![]()
Составим функцию Гамильтона
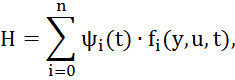
![]()
Находим ![]() ,
, ![]() ,
, ![]() которые должны быть непрерывными и ненулевыми
которые должны быть непрерывными и ненулевыми
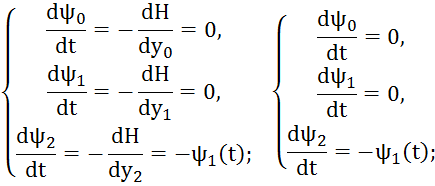
Найдем ![]() ,
, ![]() ,
, ![]()
![]()
![]()
![]()
Найденные
![]() ,
, ![]() ,
, ![]() подставим в функцию Гамильтона
подставим в функцию Гамильтона
![]()
Находим оптимальное управление из решения системы уравнений

где j = 1, 2, …, r.

Выразим U(t)

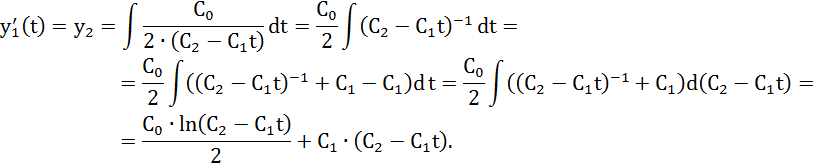
Найдем оптимальную траекторию путем интегрирования выражения (1)





Вывод: используя принцип максимума Понтрягина, нашел оптимальное управление и оптимальную траекторию.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.