1. Какими основными параметрами характеризуются типовые законы регулирования и в чем заключается их сущность?
Позиционный закон (Y = B∙sin X) характеризуется зоной нечувствительности В, которая для более качественного регулирования должна быть как можно меньше.
Пропорциональный закон (Y = kp∙X) характеризуется коэффициентом К. Если увеличить К, увеличится точность системы и уменьшится статическая ошибка. Хотя при некотором значении К система может стать неустойчивой, поэтому К должен быть оптимальным.
И (Y=∫xdt/Tи) - закон характеризуется постоянной интегрирования, увеличение которой приводит к увеличению скорости изменения вых. величины.
Переходной процесс для различных Ти:
- малого Ти - колебательный процесс;
- для большого Ти - процесс близок к апериодическому;
- для оптимального Ти - затухающие колебания.
Д (Y=Тдdx/dt) - закон характеризуется постоянной дифференцирования Тд . Чем больше Тд, тем больше коэффициент передачи системы, больше ее быстродействие.
2. Какова элементная база современных электрических регуляторов.
Современные электрические регуляторы выполняются на элементах интегральной технологии изготовления (гибридных или интегральных микросхемах), реализующих основные составляющие законов регулирования и их функциональные связи: суммирование, умножение, масштабирование, интегрирование, дифференцирование, гальваническое разделение сигналов, логические операции.
Эти основные операции выполняются с помощью ОУ, охвач. ООС, и логич. устр. К ОУ относ. интегр. усил. пост. тока с большим коэф. усил., позвол. при введении ООС, получ. св-ва, определяемые только парам. этой связи. Такой ОУ имеет коэф. усил. больше 5∙105, высокое Rвх и низкое Rвых.
Операция масштабирования и суммирования.
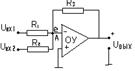
Согласно закону Кирхгофа для точки А, уравнение токов будет (Uвх1-е)/R1+(Uвх2-е)/R2=(e-Uвых)/Roc
И преобразуется, используя Ky→¥, и e→0, к виду Uвх1/R1 + Uвх2/R2 + Uвых/Roc = 0; -Uвых=Roc∙Uвх1/R1+Roc∙Uвх2/R2 = α1∙Uвх1 + α2∙Uвх2
Следовательно, вых. сигнал равен сумме масштабированных вх. сигналов: Uвых=-∑αiUвхi
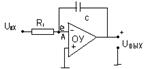
Операция интегрирования.
3. Чем характеризуется фазовый метод управления тиристорами?
Фазовый метод управления тиристорами основан но изменении фазы управляющего сигнала относительно фазы питающего напряжения. Этот метод можно разделить на 2 вида :
1) Амплитудно-фазовое управление, когда на управляющий электрод тиристора подается синусоидальное напряжение, фаза которого изменяется относительно фазы питающего анодную цепь тиристора переменного напряжения.
 2) Фазо-импульсное
управление, при котором тиристор открывается импульсом с регулируемой фазой. В
качестве управляющего сигнала используются импульсы длительностью не больше ½
полупериода питающего анодную цепь напряжения. Амплитуда этих импульсов должна
превышать ток управления спрямления.
2) Фазо-импульсное
управление, при котором тиристор открывается импульсом с регулируемой фазой. В
качестве управляющего сигнала используются импульсы длительностью не больше ½
полупериода питающего анодную цепь напряжения. Амплитуда этих импульсов должна
превышать ток управления спрямления.
Изменяя фазу управляющих импульсов 0 < a < p регулируют напряжение на нагрузке от максимального значения до 0. При этом методе управления полностью исключается влияние разбросов входных параметров тиристора, температура окружающей среды и p-n переходов, формы питающего анодную цепь напряжения.
(+): Малые потери в управляющем переходе из-за кратковременности управляющего импульса.
4. Электрические ИМ (ЭИМ)
Состоят из электродвигателя, редуктора, вых. рычага и дополнительных устройств.
В качестве привода ЭИМ используют асинхронные 3-х фазные двигатели общепромышленного назначения, специальные асинхронные 2-х фазные двигатели с полным ротором и низкооборотные двигатели. Для увеличения крутящего момента и достижения скорости перемещения вых. органа применяют цилиндрические и червячные редукторы.
Механизмы комплектуют датчиками положения вых. органа и сигнала обратной связи пропорциональному положению регулирующего органа (РО).
Промышленностью выполняются только ЭИМ постоянной скорости, а различные по величине перемещения РО реализуются вследствие различной продолжительности времени включения двигателя. Требуемый закон перемещения РО при автоматическом управлении формируется регулирующим устройством или ЭВМ и реализуется ЭИМ в результате повторно-кратковременного включения двигателя, соответствующим соотношением между длительностями включенного и выключенного состояния. В зависимости от хар-ра перемещения вых. Рычага ЭИМ подразделяют на 3 типа:
1. Многооборотные эл. механизмы МЭМ с вращающимся вых. органом, вых. вал которых совершает требуемое число оборотов.
2. Однооборотные эл. механизмы МЭО, вых. вал которых совершает поворот в пределах угла меньше 360º.
3. Прямоходные эл. механизмы МЭП, с поступательным движением вых. рычага.
Основными параметрическими характеристиками ЭИМ являются:
- Крутящий момент на валу для механизмов типа МЭО и МЭМ или усилие на штоке для механизмов типа МЭП;
- Номинальное время перемещения вых. органа;
- Номиналный угол поворота или путь и величина управляющего сигнала или диапазон его изменения.
В зависимости от способа управления ЭИМ подразделяются на механизмы с контактным и бесконтактным управлением.
В ЭИМ с контактным управление включение, отключение, переключение двигателей производится с помощью контактной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

