


Лекция 2.
1. Многомерные СУ, их математическое описание.
2. Метод пространства состояния.
3. Определения обратной матрицы.
4. Собственные значения и вектора матрицы.
5. Способ описания “вход-выход”.
Многомерные СУ
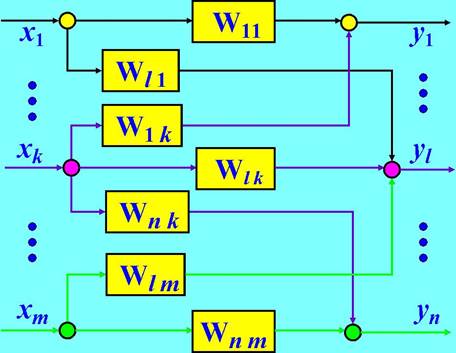
СУ сложными ТП часто содержат элементы с несколькими входными и выходными переменными. Такие элементы называют многомерными.
Многомерными элементами (МЭ) являются и ОУ. Так, электрический генератор a.c. имеет две выходные переменные – напряжение и частоту и две входные – напряжение возбуждения и частоту вращения ротора.
Для ТП флотации медной руды к выходным переменным относятся показатели качества медного концентрата (содержания меди и посторонних компонентов) и большое количество режимных параметров (плотность пульпы, размеры минеральных частиц и т. д.).
К входным управляемым переменным относятся подача реагентов, уровни пульпы в флотокамерах.
МЭ могут быть и многоканальные регуляторы в виде микропроцессорных контроллеров. В качестве выходных величин могут использоваться абстрактные переменные (производные), не имеющие конкретного физического смысла.
Тогда и одномерный элемент (но выше первого порядка) может рассматриваться как многомерный.
Для математического описания МЭ используют:
Ä динамические характеристики (диф. уравнения, ПФ, частотные характеристики) для реальных входных и выходных переменных – метод “вход-выход” или Input/Output – IO;
Ä диф. уравнения в форме Коши для абстрактных выходных – переменных состояния – метод пространства состояния (ПС) или State Space – SS.
Метод пространства состояния
Понятие состояния, лежащее в основе современного подхода к описанию динамических систем, было введено Тьюрингом в 1936 г. Позднее метод ПС для анализа и синтеза оптимальных СУ использовал Беллман, затем Калман, оказавший своими работами значительное влияние на современное состояние ТАУ.
С точки зрения анализа и синтеза СУ целесообразно разделить все переменные, характеризующие систему или имеющие к ней определенное отношение, на три группы, а именно:
1) входные переменные или воздействия ui - сигналы, генерируемые системами, внешними по отношению к исследуемой системе;
2) выходные переменные или переменные, характеризующие реакцию системы yj;
3) переменные (координаты) состояния или промежуточные переменные xk, характеризующие динамическое поведение исследуемой системы.
Схематически система может быть изображена в виде “черного ящика” с некоторым числом входных и выходных каналов.
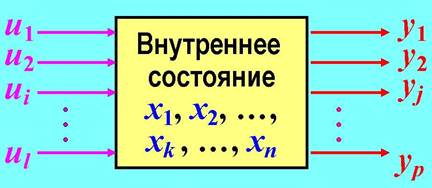
Входные каналы – это совокупность входных переменных или входных воздействий ui; выходные каналы – совокупность выходных переменных или выходных координат yj системы.
Промежуточные переменные – координаты состояния xkотнесены к содержимому “черного ящика” и скрыты от наблюдателя. Величины ui, yj и xkявляются функциями времени ui(t), yj(t) и xk(t) для момента t.
Для удобства оперирования с многомерными величинами совокупность входных переменных представляют в виде вектора входа
совокупности выходных переменных и переменных состояния – в виде, соответственно, вектора выхода и вектора состояния
Согласно понятию векторного пространства множество всех значений, которые может принять вектор входа u в момент t, образует пространство входа системы. Множество всех значений, которые может принять вектор выхода у в момент t, образует пространство выхода системы, и множество всех значений, которые может принять вектор состояния х, - пространство состояний системы.
В любой момент t состояние системы есть функция начального состояния x(t0) и вектора входа u (t0, t), т. е.
x(t) = F[x(t0); u(t0, t)], (3.1)
где F - однозначная функция своих аргументов.
Вектор выхода в момент t является также функцией x(t0) и u(t0, t) и может быть записан как
y(t) = j[x(t0); u(t0, t)]. (3.2)
Уравнения (3.1) и (3.2) называются уравнениями состояния системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.