Синтез последовательного корректирующего устройства на основании метода желаемой ЛАЧХ.
Для того, чтобы система соответствовала нужным показателям по точности и одновременно соблюдалось условие устойчивости необходимо произвести коррекцию исходной системы, т.е. ввести в цепь регулятора корректирующее звено.
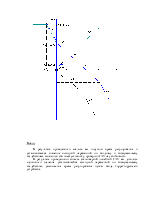
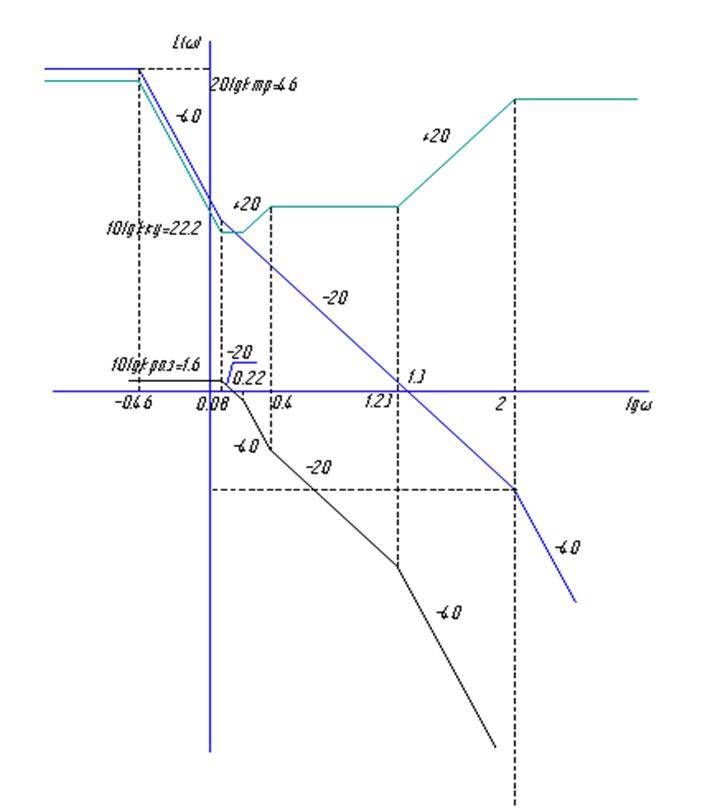
Синтез корректирующего звена производят с помощью ЛАЧХ. Т.е. строим ЛАЧХ исходной системы и желаемую ЛАЧХ, а затем, вычитая из желаемой исходную, получим ЛАЧХ корректирующего звена. По ней восстановим передаточную функцию корректирующего звена.
2.1 Построение ЛАЧХ исходной системы.
Передаточная функция исходной разомкнутой системы:

Для построения ЛАЧХ исходной системы нам нужно построить ЛАЧХ типовых составляющих звеньев, а затем просуммировать их. Предварительно определим характерные точки:
![]() .
.
Для апериодических звеньев (в схеме их 3) также находим частоты, но лучи проводим под наклоном в -20дБ/дек:
![]()
![]()
![]()
Для форсирующего звена находим частоту:
![]() .
.
В координатной плоскости [L(w), lgw]
при частоте w=1(lg1 = 0 дек) отложим
ординату ![]() , а также логарифмы частот сопряжения.
, а также логарифмы частот сопряжения.
Построение
ведем слева направо. В низкочастотной области (до минимальной частоты
сопряжения) асимптотическая ![]() - прямая линия,
проходящая под наклоном 0 дБ/дек, т.к. нет дифференцирующих и интегрирующих
звеньев, через точку с координатами (
- прямая линия,
проходящая под наклоном 0 дБ/дек, т.к. нет дифференцирующих и интегрирующих
звеньев, через точку с координатами ( ![]() , 0).
При частотах сопряжения апериодических звеньев наклон
, 0).
При частотах сопряжения апериодических звеньев наклон ![]() изменяется
на -20 дБ/дек, форсирующих +20 дБ/дек. Таким образом, асимптотическая
изменяется
на -20 дБ/дек, форсирующих +20 дБ/дек. Таким образом, асимптотическая ![]() представляет собой ломаную с наклонами
представляет собой ломаную с наклонами
0, -20, -40, -20 и -40 дБ/дек.
2.2 Построение желаемой ЛАЧХ.
Желаемую ЛАЧХ строим по рекомендациям, т.е. строим такую ЛАЧХ, которая полностью удовлетворяет требованиям статического и динамического качества управления.
Алгоритм построения:
1) Определяем частоту среза:
 .
.
Т. к. мы взяли 
2) Из точки ![]()
![]() проводим
среднечастотную связь с наклоном -20 дБ/дек. Ограничения среднечастотной
части
проводим
среднечастотную связь с наклоном -20 дБ/дек. Ограничения среднечастотной
части ![]() (находим по монограмме.
(находим по монограмме.
3) В низкочастотной части откладывается ордината
 ,
,
4) В области высоких частот построение повторяет соответствующую ЛАЧХ исходной системы.
2.3 Нахождение ЛАЧХ корректирующего звена и восстановление передаточной функции корректирующего звена.
ЛАЧХ корректирующего звена находим как разницу между желаемой ЛАЧХ и исходной.
Восстановим передаточную функцию с учетом численных значений.
Передаточная функция состоит из (смотрим слева направо):
1) Колебательного звена:
2) Форсирующего звена 2го порядка: ![]()
3) Форсирующего звена 1го прядка: ![]() ;
;
4) Апериодического звена:  .
.
5) Форсирующего звена 1го порядка: ![]()
6) Апериодического звена: 
Восстанавливаем передаточную функцию корректирующего звена:
 ,
,
Из графика видно: ![]() ,
, ![]()
По графику видно:
 ,
,
 ,
, 
 ,
,
 ,
,
для всех звеньев примем ![]()

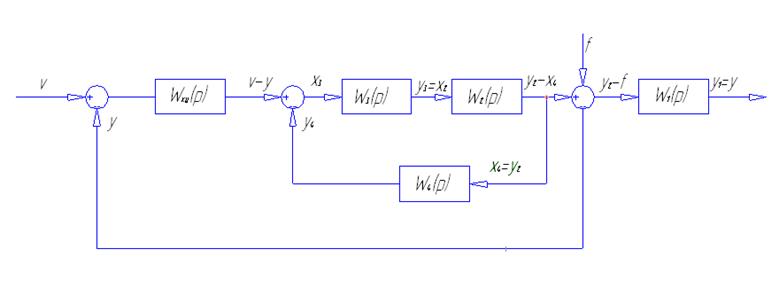
2.4 Структурная схема синтезированной САУ с учётом последовательного корректирующего устройства.
2.5 Рассчитаем запас устойчивости
по фазе скорректированной САУ и сравним полученное значение с требуемой
величиной ![]() (по монограмме)
(по монограмме)
Желаемая ЛАЧХ состоит из 3 звеньев:
1) Колебательного
2-го порядка: 
2) Форсирующего
1-го порядка: ![]()
3) Апериодического:


, где  ,
,
 ,
, 

2.6 Моделирование процессов системы.
Структурная схема модели:
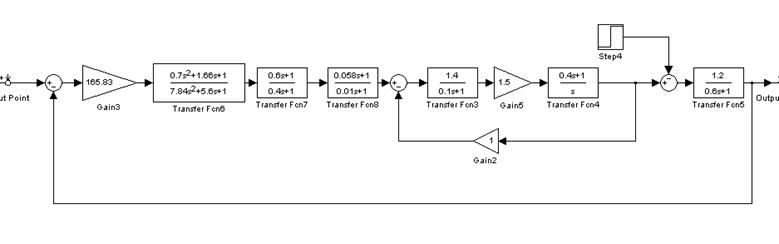
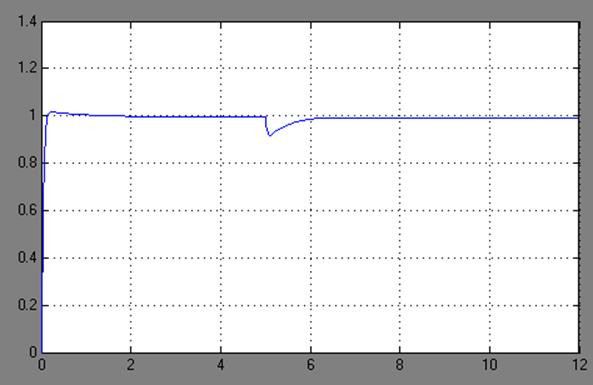
рис.3 График переходного процесса скорректированной САУ при подаче единичного ступенчатого воздействия
Установившееся значение выходной
переменной ![]() .
.
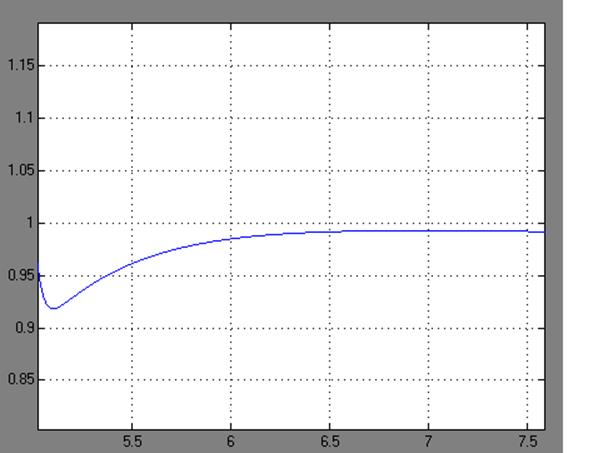
рис. 4 График переходного процесса при приложении единичного ступенчатого возмущающего воздействия
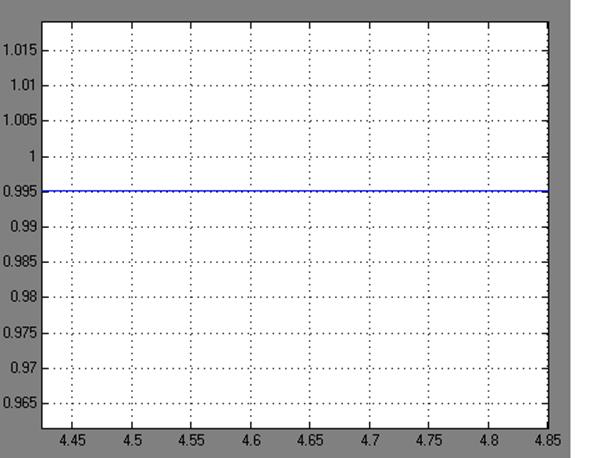
рис. 5 График установившегося значения выходной переменной при приложении единичного ступенчатого возмущающего воздействия
Как видно,
ошибка регулирования находится в пределах заданного значения ![]() .
.
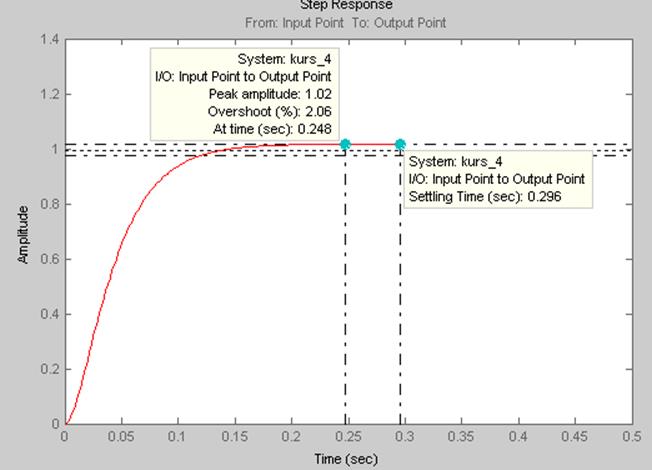
tр=0,2с
Установившееся значение выходной переменной ![]() с
с ![]()
Время перерегулирования 0,248с
![]()
Вывод.
В результате проведённого анализа мы получили время регулирования и установившееся значение выходной переменной по входному и возмущающему воздействиям, вычислили статическую ошибку, проверили САУ на устойчивость.
В результате проведённого синтеза стационарной линейной САУ мы добились единичного значения установившейся выходной переменной по возмущающему воздействию, уменьшения время регулирования путём ввода корректирующего устройства.
Литература:
1. «Теория автоматического управления» Бабаков Н. А., Воронов А. А., Дидук Г. А.. «Высшая школа», 1977г.
2. «Теория автоматического регулирования» Востриков А. С., Французова Г. А.. Москва «Высшая школа», 2004г.
3. Нос Олег Викторович «Конспект лекций»
НГТУ, 2008.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.