Передаточное отношение быстроходной и тихоходной ступеней редуктора определяем в соответствии с предпочтительным рядом передаточных отношений ГОСТ 2185-66.
Uб=1.6; Uт=2.24; Uфр=20;
Рассчитаем общее передаточное отношение:
Uоб= Uб × Uт × Uфр =71.68;
Скорость исполнительного органа (оси карусели) для рассчитанного общего передаточного отношения будет равна:
![]()

Найдем ошибку по скорости исполнительного органа:

[D] = 5%; D £ [D]
КПД привода рассчитаем по формуле:
hоб=hк×hц×hм×hфр×hп3=0.97×0.98×0.98×0.96×0.993=0.87
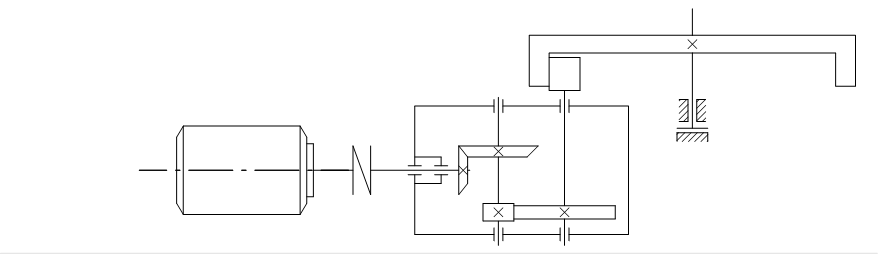
где hк , hц , hм , hфр ,hп3-
КПД конической, цилиндрической передачи, муфты, открытой фрикционной и трех пар
подшипников соответственно.
Рис. 2. Кинематическая схема 1.
Схема 2.
Двигатель 4А90L6 n=1000 об/мин, Рном=1.5 кВт;
Передаточное отношение быстроходной и тихоходной ступеней редуктора определяем в соответствии с предпочтительным рядом передаточных отношений ГОСТ 2185-66.
Uб=1.4; Uт=3.55; Uфр=20;
Рассчитаем общее передаточное отношение:
Uоб= Uб × Uт × Uфр =99.4;
Скорость исполнительного органа (оси карусели) для рассчитанного общего передаточного отношения будет равна:
![]()

Найдем ошибку по скорости исполнительного органа:

[D] = 5%; D £ [D]
КПД привода рассчитаем по формуле:
hоб=hц3×hм×hфр×hп3=0.983×0.98×0.96×0.993=0.86
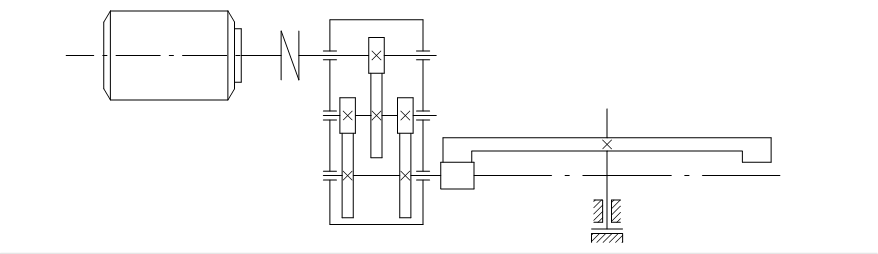
где hц3 , hм , hфр , hп3- КПД трех
цилиндрических передач, муфты, открытой фрикционной и трех пар подшипников
соответственно.
Рис. 3. Кинематическая схема 2.
Схема 3.
Двигатель 4А80B4 n=1500 об/мин, Рном=1.5 кВт;
Передаточное отношение быстроходной и тихоходной ступеней редуктора определяем в соответствии с предпочтительным рядом передаточных отношений ГОСТ 2185-66.
Uб=2.8; Uт=2.5; Uфр=20;
Рассчитаем общее передаточное отношение:
Uоб= Uб × Uт × Uфр =140;
Скорость исполнительного органа (оси карусели) для рассчитанного общего передаточного отношения будет равна:
![]()

Найдем ошибку по скорости исполнительного органа:

[D] = 5%; D £ [D]
КПД привода рассчитаем по формуле:
hоб=hц2×hм×hфр×hп3=0.982×0.98×0.96×0.993=0.88
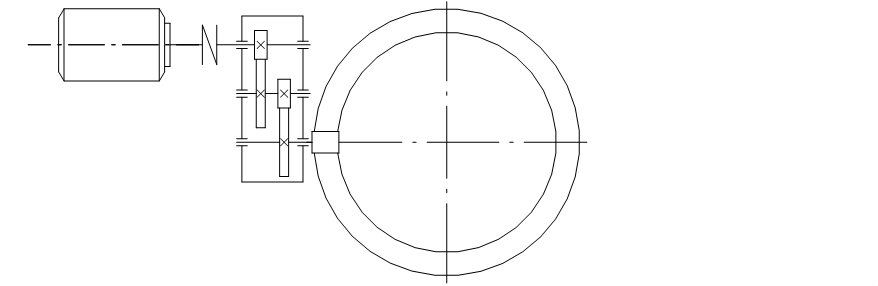 |
Рис. 4. Кинематическая схема 3.
2. Выбор кинематической схемы.
Выбираем кинематическую схему №3, т.к. она наиболее простая по отношению к схеме №2 и лишена такого недостатка как вытекание масла через подшипниковые узлы в схеме №1. Примененная коническая передача в схеме №1 требует регулировку положения шестерни, причем последняя расположена консольно (имеет большой прогиб), что является существенным недостатком. Прямозубая цилиндрическая передача проста в изготовлении. При ее использовании практически отсутствуют осевые силы, что позволяет применять простые подшипниковые узлы.
3. Кинематический расчет.
Момент
на валу двигателя: 
где Рдв - расчетная мощность двигателя,
w1 - угловая скорость двигателя.
Рдв =1.16 кВт, nдв=1500 об/мин;

![]()
Момент на первом валу :
Т1=Тдв×hм×hп=7.39×0.98×0.99=7.17 Н×м.
Момент на втором валу:
Т2=Т1×Uб×hц×hп=7.17×2.8×0.98×0.99=19.47 Н×м.
Момент на третьем валу:
Т3=Т2×Uт×hц×hп=19.47×2.5×0.98×0.99=47.22 Н×м.
Момент на четвертом валу Т4 равен:
Скорость вращения двигателя nдв=1500 об/мин.
Скорость вращения первого вала равна скорости вращения двигателя n1=nдв=1500 мин-1 (w=157с-1).
Скорость вращения второго вала равна:

Скорость вращения третьего вала:

Скорость вращения четвертого вала: 
4. Расчет зубчатых колес редуктора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.