НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра АППМ
Отчет по лабораторной работе
Дисциплина:‹‹Теория автоматического управления»
Работа №1
Наименование: Переходные характеристики типовых линейных динамических звеньев в составе системы автоматического управления
Группа КП-501
Вариант № 4
Горбачевский Виталий
Кожемяко Ирина
Работа защищена:
Преподаватель: Нос О. В.
Новосибирск
2008 г.
Цель работы
Целью работы является изучение с помощью метода цифрового моделирования переходных характеристик типовых линейных динамических звеньев, а также исследование основных правил структурного преобразования систем автоматического управления.
1 Исходные данные
|
K1 |
K2 |
K3 |
T1 |
T2 |
T |
ξ |
τ |
|
5 |
0.8 |
4.2 |
1 |
0.16 |
0.4 |
1.45 |
2.5 |
Где T- постоянная времени, K- коэффициент передачи, ξ- коэффициент демпфирования,
τ- постоянная времени запаздывания.
2. Переходные характеристики типовых звеньев
2. 1.Интегрирующее звено
2.1.1.Исследовать переходные характеристики интегрирующего звена при различных значениях коэффициента k1.
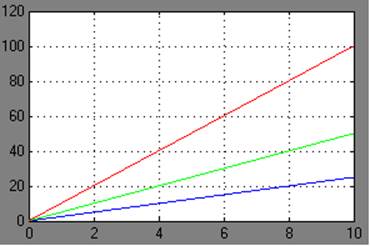
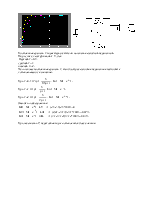
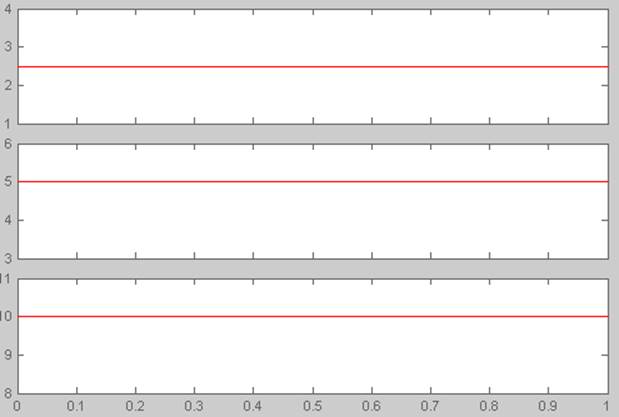
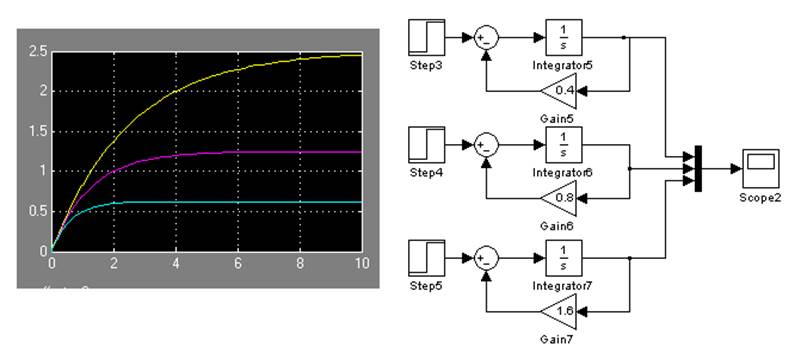
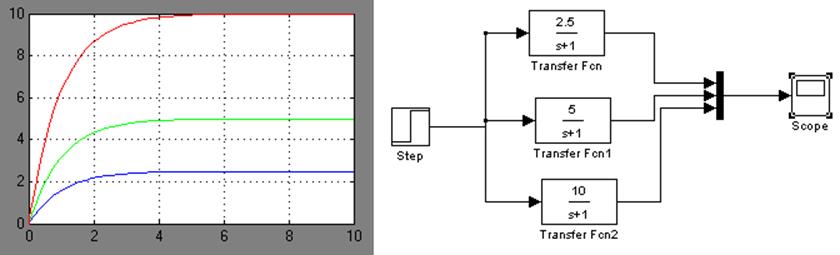
Переходные характеристики типового интегрирующего звена при kmin=2.5,
kном=5,
kmax=10.
На рисунке нижняя линия соответствует kmin, верхняя линия-kmax, а между ними линия, соответствующая kном.
Переходная характеристика типового интегрирующего звена является линейной и возрастает с течением времени. При увеличении k значения переходной функции пропорционально увеличиваются.
При kmin=2.5 W(p)=2.5/p, h(t)=2.5t.
При kном=5 W(p)=5/p, h(t)=5t.
При kmax=10 W(p)=10/p, h(t)=10t.
Для любого выбранного момента времени ошибка моделирования равна нулю.
Импульсные характеристики
При kmin=2.5 W(p)=2.5/p, w(t)=2.5
При kном=5 W(p)=5/p, w(t)=5
При kmax=10 W(p)=10/p, w(t)=10
Для любого выбранного момента времени ошибка моделирования равна нулю.
2.1.2. Получить переходные характеристики на выходе последовательно соединенных интегрирующего и безынерционного звеньев с коэф. передачи k1 и k2 соответственно.
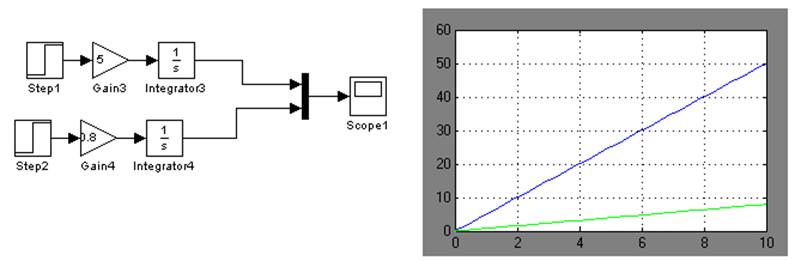
При последовательном соединении интегрирующего и безынерционного звеньев передаточная функция находится следующим образом:
W1(p)= k1/p=5/p. Переходная функция h(t)=5t.
W2(p)= k2/p=0.8/p. Переходная функция h(t)=0.8t.
Для любого выбранного момента времени ошибка моделирования равна нулю.
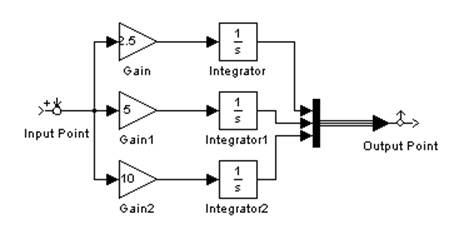
2.1.3.Получить переходные характеристики динамической системы при параллельном соединении двух интегрирующих звеньев с коэф. передачи k1 и k2 и различными знаками на выходном сумматоре.
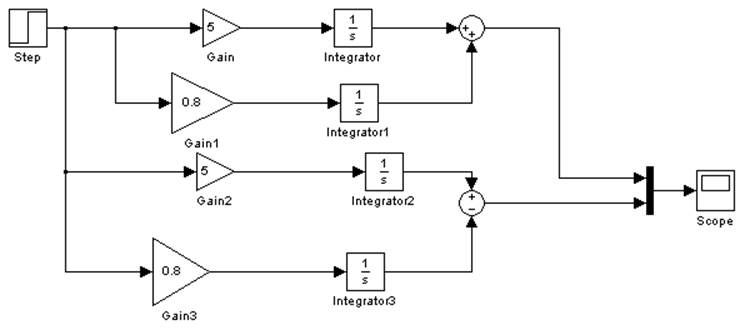
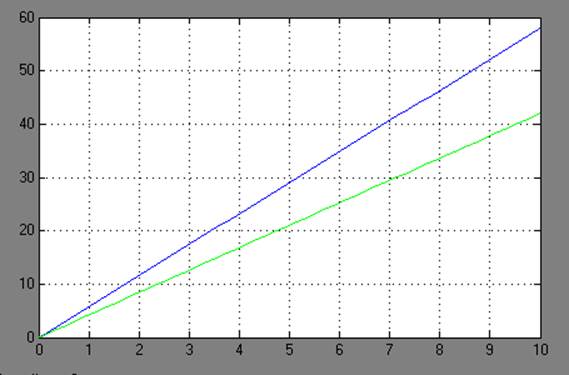
В первом случае общая передаточной функцией будет W(p)=5/p-0.8/p=4,2/p.Передаточная функция h(t)=4.2t. Во втором случае
общая передаточной функцией будет W(p)=5/p+0.8/p=4,2/p.Передаточная функция h(t)=5,8t.Для любого выбранного момента времени ошибка моделирования
равна нулю.
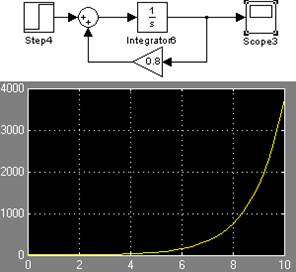
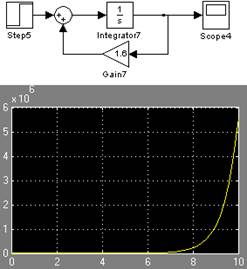
2.1.4. Исследовать влияние безынерционной отрицательной (положительной) обратной связи с коэф. передачи k2 на переходную характеристику интегрирующего звена. (k2=0,8)
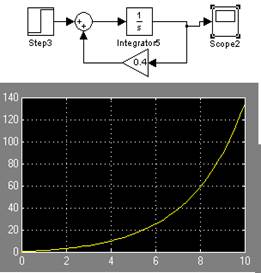
Ступенчатое воздействие равно 1.
Передаточная характеристика найдется как  (“-”-
для ПОС., “+” - для ООС)
(“-”-
для ПОС., “+” - для ООС)
При ПОС 
![]() .
.
Ошибки моделирования:
![]() Δ=(7,659-7,66)/7,66*100%=0,01%
Δ=(7,659-7,66)/7,66*100%=0,01%
![]() Δ=(24,706-24,706)/24,706*100%=0%
Δ=(24,706-24,706)/24,706*100%=0%
Переходная характеристика стремится к бесконечности. А при ООС

пяти ![]() .
.
![]() Δ=(3,44-3,4417)/3,4417*100%=0,05%
Δ=(3,44-3,4417)/3,4417*100%=0,05%
![]() Δ=(4,988-4,988)/4,988*100%=0%
Δ=(4,988-4,988)/4,988*100%=0%
Время регулирования найдем из  → tр= 3,74
→ tр= 3,74
Переходная характеристика по виду напоминает типовую характеристику типового апериодического звена и стремится к определенному значению (в данном случае 6,25).
Вывод: Исследовали и изучили интегрирующее звено, его импульсные и весовые характеристики, а так же влияние на него коэффициента передачи, ПОС и ООС (с различными коэффициентами в канале ОС)
2.2. Апериодическое звено.
W(p)=k/(Tp+1)=5/(p+1)
2.2.1. Исследовать влияние коэффициента передачи k1 и постоянной времени T1 апериодического звена на параметры переходной характеристики.
На рисунке представлены переходные функции, для На рисунке представлены переходные функции, для которых T=1,
для верхней k=10,
средней k=5,
нижней k=2,5.
При к=10  ,
, ![]() .
.
При к=5  ,
, ![]() .
.
Ошибки моделирования:
![]() Δ=(3,16-3,16)/3,16*100%=0
Δ=(3,16-3,16)/3,16*100%=0
![]() Δ=(4,323-4,3233)/4,3233*100%=0,006%
Δ=(4,323-4,3233)/4,3233*100%=0,006%
Время регулирования:  → tр. 2.995;
→ tр. 2.995;
Установившееся значение ![]() Равенство
установившегося значения, найденного аналитически теоретическому значения
выполняется.
Равенство
установившегося значения, найденного аналитически теоретическому значения
выполняется.
При к=2,5  ,
, ![]() .
.
При увеличении k становится больше установившееся значение переходного процесса.
Постоянная времени T характеризует темп изменения выходной переменной.
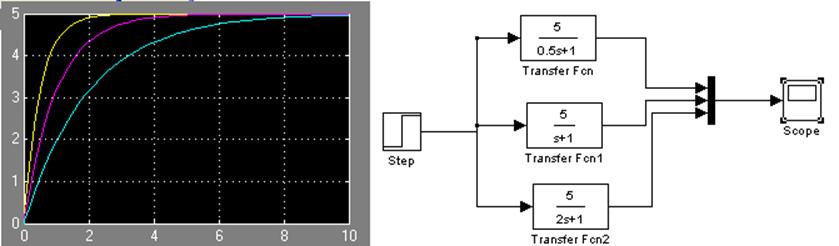
На рисунке у всех функций k=5, для
Верхней T=0.5,
средней T=1,
нижней T=2.
Чем меньше постоянная времени T, тем быстрее выходная переменная подходит к установившемуся значению.
При T=0.5  ,
, ![]() .
.
При T=1 , ![]() .
.
При T=2  ,
, ![]() .
.
Ошибки моделирования:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.