

























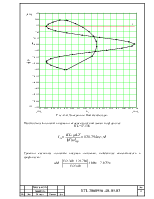











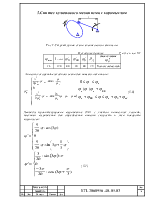



Построение планов положениё производим следующим образом.
1. Выбираем масштабный коэффициент длин m= 0.001 м/мм и рассчитываем
чертёжные размеры звеньев табл.2.1
Таблица 2.1
|
О1А, мм |
О2В, мм |
ВС, мм |
У, мм |
|
100 |
1270 |
440 |
550 |
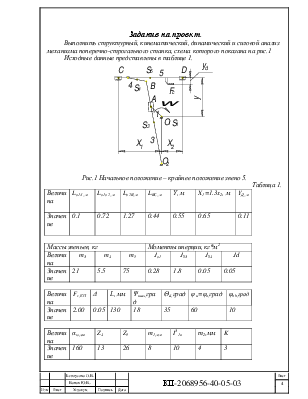
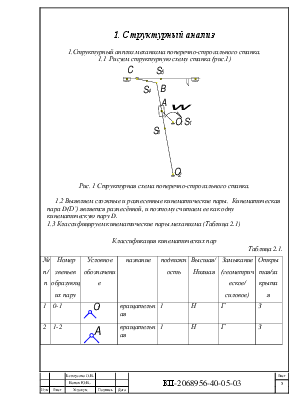
2. Отмечаем на чертеже неподвижные точки О1, О2 , рисуем в них вращательные
кинематические пары;
3. На расстоянии У от точки О1 проводим траекторию движения ползуна 5;
4. Проводи окружность О1А, которая является траекторией движения точки А;
5. На траектории движения точки А отмечаем крайние положения кулисы 3 и
откладываем длину О2В;
6. На траектории движения точки С отмечаем крайние положения ползуна 5 и
соединив крайние точки С с точками В крайних положений кулисы получим
крайние положения шатуна 4;
7. Зная полную длину хода Н ползуна 5 находим начало и конец рабочего хода, от
крайних положений точки С откладываем внутрь отрезка Н длину Н/10;
8. Методом засечек строим положения шатуна 4, кулисы 3 и кривошипа 1;
9. Делим траекторию звена 1 на 12 частей начиная от левого крайнего положения;
10.Методом засечек строим положения кулисы 3, шатуна 4 и ползуна 5 ;
11.При построении планов механизма отмечаем положения центров масс
звеньев 3, 4,5;
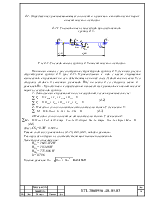
2.4.2 Определение аналогов скоростей исследуемого станка графическим
методом для 2-ого положения.
План скоростей механизма строим в следующем порядке:
1. Находим скорость точки А:
VA=w1LO1A= 1×0,1=0,1 м/c;
2. Из полюса плана скоростей р откладываем отрезок 50 мм, изображающий
вектор скорости точки А, направленный по касательной к траектории в
сторону вращения кривошипа.
3. Подсчитываем масштабный коэффициент скоростей
m=VA/ра= 0,1/100=0,001 м/c/мм.
4. Скорость т. А1 принадлежащей звену 1 равна скорости т А2, принадлежащей
звену 2: VA1=VA2
В свою очередь VA2=VA3+VA2/A3
Из т а строим направление VA2/A3 (параллельно О2В). Из полюса р, плана
скоростей, проводим направление VA3 перпендикулярно О2В, точка
пересечения – а3.
ра3- аналог скорости VA2/A3 (Т. А во вращении со звеном 3 относительно т О2 )
ра3=
83,32 мм ![]()

Cкорость движения ползуна 2 вдоль звена 3 находим по формуле
![]()
pа3-
аналог скорости VA2/A3 ![]()
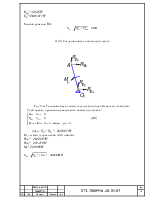
5.
Скорость т В по теореме подобия: ![]() 0,0876583581921891186859546424693269
0,0876583581921891186859546424693269
pb=132,07мм
Из полюса р перпендикулярно О2В в направлении вращения О2В
откладываем аналог VB (т.е. pb).
6. С другой стороны скорость т В имеет вид:
VB=VC+VB/C
Из полюса р, параллельно траектории движения т С, строим направление
VC. Из т b, перпендикулярно ВС, до пересечения с направлением скорости
т С, строим аналог VB/C.
рс=131,6мм ![]()
bc= 10,14мм
![]()
![]()
7. Скорости центров тяжести.
Звено 3:
ps3=pb*O2S3/O2B ps3=66,04мм
На pb откладываем ps3.
Звено 4:
Центр масс звена 4 лежит на ВС, отметим эту точку между одноименными
точками плана скоростей
ps4- аналог VS4
8. Результаты заносим в таблицу 2.2.
Таблица2.2
Результаты расчета аналогов скоростей

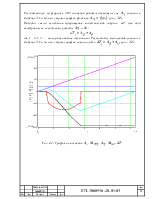
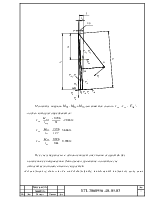
2.4.3 Определение аналогов ускорений исследуемого механизма графическим методом.
Задачу решаем путём построения плана ускорений, считая w1 постоянной
величиной:
Определяем ускорение точки А.
aA1= aA1n+aA1t
aA1n= О1А×w12=0.1×12=0.1м/c2
aA1t=0 т.к. считаем, что w1=const
aA1n направлено от т А1 к О1
Из полюса плана ускорений p откладываем вектор, изображающий
ускорение точки А1, в виде отрезка pа = 200 мм
Подсчитываем масштабный коэффициент ускорений
mа= aA1n/pа1= 0.1/200=0,0005 м/c2/мм.
Ускорение точки А, принадлежащей звену 2 складывается из следующих
составляющих
aA2=aA3n+aA3t+aA2/A3+ak
ak=2j’3*Vотн =2×0.104×0,0553=0,0115024м/c2
a3k=ak/ma a1k= 0,0115024/0.0005=23,0048мм
Направление кориолисова ускорения определяется поворотом относительной
скорости Vотн на 90о по направлению переносной угловой скорости w3. Из
точки k к точки а1 по направлению 90о к относительной скорости
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.