27. Пневмоэлектрический преобразователь
 ПЭП служат для преобразования
пневмосигнала в электрический сигнал. По виду сигналов различают аналоговые и
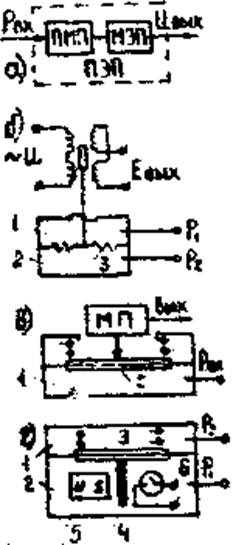
дискретные ПЭП. Схема ПЭП включает два преобразователя (а): пневмомеханический
(ПМП) и механоэлектрический (МЭП).
ПЭП служат для преобразования
пневмосигнала в электрический сигнал. По виду сигналов различают аналоговые и
дискретные ПЭП. Схема ПЭП включает два преобразователя (а): пневмомеханический
(ПМП) и механоэлектрический (МЭП).
Схема простейшего ПЭП (б): разность давлений ΔР=Р1-Р2, подаваемых в камеры I и 2, с помощью мембраны 3 преобразуется в перемещение плунжера ДТП и, соответственно, в выходной сигнал Евых (при ΔР=0 плунжер находится в нейтральном положении Евых=0). Это - ПЭП аналогового действия.
На рис. в,г представлены схемы ПЭП дискретного действия; они преобразуют дискретные пневмосигналы в переключение контактов, коммутирующих электрические цепи. При подаче импульса давления Рвх в камеру I преобразователя (б,в) мембрана 2 своим жестким центром воздействует на микропереключатель МП и переключает его контакты.
Двухпозиционный ПЭП (рис. г) содержит камеры I и 2, отделенные друг от друга эластичной мембраной 3 с жестким центром, на котором закреплен магнитный экран 4 (из ферромагнитного материала). Экран находится между постоянным магнитом 5 и магнитоуправляемым контактом (геркон) 6. При отсутствии управляющего сигнала (давлений Р1, Р2 экран находится в нижнем положении и перекрывает поле постоянного магнита, в результате чего контакт размыкается. При подаче пневмосигнала Р1 экран переместится вверх и магнитоуправляемый контакт замкнется.
В случае необходимости в верхнюю камеру ПЭП можно подать второй управляющий сигнал Р2. При этом срабатывание ПЭП будет являться функцией алгебраической суммы двух сигналов. В качестве ЭМП и МЭП обычно используются: магнитоэлектрические, электромагнитные, электромашинные, магнитострикционные преобразователи. В качестве МПП: различного рода преобразователи "сопло-заслонка". В качестве ПМП пневматический привод мембранного, сильфонного или поршневого типа.
47. Корректирующие звенья и способы их включения в систему
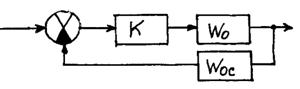
Корректирующие звенья делятся на последовательные – устройства которые включаются последовательно и параллельно. паралельные – устройства которые включаются через местную обратную связь.
Типы последовательных коректирующих устройств:
1)
Повышения
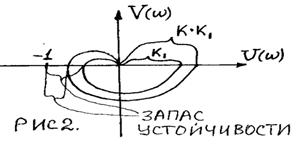
общего коэффициента усиления в Р. Цепи. Простейший метод повышения точности системы
![]()
Повышая точность системы это корректирующее устройство приводит к ухудшению заносов устойчивости следовательно снижается качество переходного процесса.
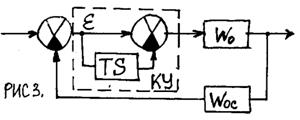
2) Введение производной от ошибки – метод улучшения качества переходного процесса.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
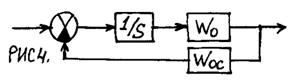
3) Введение интеграла от ошибки – простейший метод повышения точности системы, т.к. такое корректирующее устройство делает ее системой с астатизмом.
![]()
![]()
![]() Улучшая
точность это корректирующее устройство снижает качество переходного процесса.
Улучшая
точность это корректирующее устройство снижает качество переходного процесса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.