Содержание
Задание……………………………………………………………………………………………………………………..3
Задание на проектирование…………………………………………………………………………………………….3
1. Выбор общей структуры устройства числового программного управления..…..5
1.1. Общая структура устройства ЧПУ………………………………………………………………………….…5
1.2. Выбор рабочей станции………………………………………………………………………………..6
3. Выбор комплекта модулей для устройства управления……………………………..…..13
3.1. Выбор одноплатного промышленного компьютера………………………………...14
3.2. Выбор модулей устройств связи с объектом (УСО)…………………………………..14
3.3 Выбор модулей хранения информации…………………………………………………….16
Список Литературы………………………………………………………………………………………………….18
Задание:
Цель курсового проекта – спроектировать систему числового программного управления механизмом путём выбора её отдельных блоков, аппаратно-программных компонентов, расчёта прикладных задач.
В курсовом проекте выбирается общая структура устройства ЧПУ с комплектом блоков, измерительная система, комплект конечных выключателей для механизма, комплект модулей связи с объектом, операционная система. Предлагается выполнение расчёта программного управления движением механизма в пределах одного кадра управляющей программы. Для этого рассчитывается программная траектория движения, преобразование координат, разгон и торможение механизма в соответствии с вариантом. Определяется влияние массы груза или инструмента на динамику одной из осей механизма. Разрабатывается и отлаживается программа решения прямой кинематической задачи механизма.
Задание на проектирование:
В таблице №1 приведен мой вариант задания на курсовой проект. Начало, конец, а также длину траектории выбрать, согласовывая их с размерами рабочей зоны ИМ в мировой (технологической) системе координат. Разгон выполняется от нулевой скорости предыдущего кадра. Торможение в конце кадра должно производиться до минимальной скорости, равной 0.001 м/с для всех вариантов.
Таблица №1
|
№ варианта |
№ страницы |
Название исполнительного механизма |
|
8 |
8 |
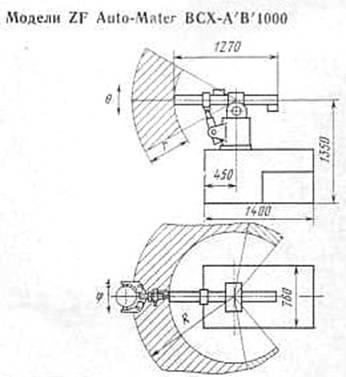
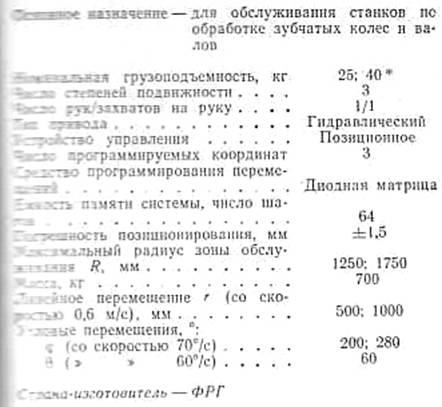
ZF Auto - Mater BCX - A B 1000 |
На рисунке 1 приведен манипулятор, соответствующий варианту.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




