В настоящее время получил распространение импульсный метод регулирования скорости вращения. Действующее значение тока обмотки якоря, пропорционально которому устанавливается частота вращения двигателя, зависит от амплитуды, длительности и частоты повторения импульсов, В цепь якоря включается индуктивность, а параллельно якорю — конденсатор. Если параметры схемы выбраны так, что пульсация напряжения питания не превышает 6—10%, то работа двигателя практически не отличается от работы при постоянном напряжении. Регулировка напряжения осуществляется изменением длительности импульсов. Для импульсного регулирования частоты вращения маломощных двигателей применяются схемы на транзисторах, а двигателей средней и большой мощности — тринисторные схемы.
Управление двигателем путем изменения тока в обмотке якоря носит название якорного управления. Управление двигателем за счет изменения тока в обмотках полюсов носит название полюсного управления.
Эксплуатационные свойства электрических двигателей определяются их характеристиками. Основными характеристиками являются рабочие, механические и регулировочные.
Рабочие характеристики представляют собой зависимость частоты вращения n, полезного момента на валу двигателя М2 и потребляемого тока I от полезной мощности двигателя Р2, т. е. от нагрузки двигателя.
Механические
характеристики определяют зависимость частоты вращения n от электромагнитного момента М :![]() . Регулировочные характеристики определяют
зависимость частоты вращения n от
параметров, изменением которых осуществляется регулировка частоты вращения
двигателя, например, от тока в обмотке возбуждения IВ.
. Регулировочные характеристики определяют
зависимость частоты вращения n от
параметров, изменением которых осуществляется регулировка частоты вращения
двигателя, например, от тока в обмотке возбуждения IВ.
2.Электродвигатели переменного тока
Наибольшее распространение среди электродвигателей переменного тока в автоматике получили асинхронные двигатели.
Асинхронные электродвигатели делят на три класса: 1) трехфазные; 2) однофазные; 3) двухфазные—с короткозамкнутым ротором, с полым ферромагнитным ротором, с полым немагнитным ротором.
В автоматических системах чаще всего применяются асинхронные электродвигатели с полым немагнитным ротором, которые имеют ряд существенных преимуществ: малый момент инерции ротора; отсутствие скользящих токоподводов (щеток), что уменьшает момент трения и исключает радиопомехи; удобство регулирования и реверсирования вращения; плавность и бесшумность хода; пропорциональность частоты вращения напряжению питания; возможность питания от усилителя переменного тока; стабильность характеристик при значительном изменении температуры окружающей среды; отсутствие самохода.

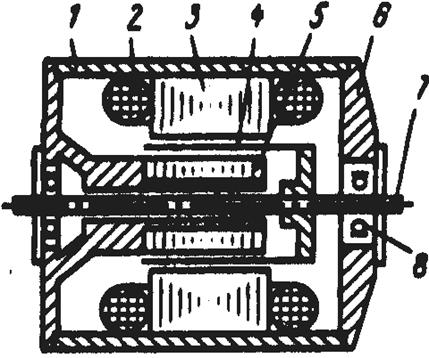
Схема конструкции электродвигателя с полым немагнитным ротором изображена на рис 2.
В корпусе 1 установлен сердечник 3 из изолированных друг от друга листов электротехнической стали. В пазах сердечника размещена обмотка статора 2. Внутренний сердечник 5 также собирается из листов электротехнической стали и закрепляется на одном из подшипниковых щитов 6. Он служит для уменьшения сопротивления пути основного магнитного потока. Полый ротор 4 выполняется в виде тонкостенного цилиндра из немагнитного металла, чаще всего из сплавов алюминия; толщина стенок цилиндра 0,2—1 мм в зависимости от мощности двигателя. Ротор закрепляется на валу 7, вращающемся в подшипниках 8. Между стенками ротора и сердечниками имеется зазор 0,15— 0,25 мм.
Вращающий момент в этом двигателе создается в результате взаимодействия вращающегося магнитного поля, возникающего при питании обмоток статора переменным током, с вихревыми токами, наводимыми в стенках ротора этим же вращающимся магнитным полем. Направление вращения ротора совпадает с направлением вращения магнитного поля. Вращающееся магнитное поле образуется как результирующее пульсирующих магнитных полей обмоток возбуждения и управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.