Министерство высшего и профессионального образования РФ
Волжский инженерно-строительный институт
Волгоградской государственной архитектурно-строительной академии
Контрольная работа
по дисциплине
«ОСНОВЫ АВТОМАТИЗАЦИИ МАШИН И РОБОТОТЕХНИКИ»
Вариант №4
Выполнил: студент
СДМ-2-00-УЗ
Османов В.В
З/к 2224
Проверил: преподаватель
Назаренко Вячеслав Алексеевич
Волжский 2003
ЗАДАНИЕ 1. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
Исполнительные механизмы предназначены для (непосредственного или через регулирующий орган) воздействия на регулируемый процесс. К исполнительным устройствам предъявляются следующие основные требования: высокая надежность; отработка управляющего сигнала с заданной точностью; максимальное быстродействие достаточная выходная мощность; максимальный коэффициент полезного действия; минимальная стоимость; минимальные размеры и масса.
Устройства, преобразующие изменение тока, напряжения или фазы электрического сигнала в механическое перемещение, называют электрическими исполнительными устройствами. Их можно разделить на два вида: электродвигатели и электромагнитные органы.
Электродвигатели чаще, чем какие-либо другие устройства, применяют в исполнительных органах автоматики. В зависимости от вида питающего напряжения электродвигатели подразделяют на двигатели постоянного тока, двигатели переменного тока (синусоидального) и импульсные (шаговые) двигатели,
1.Электродвигатели постоянного тока
Электродвигатели постоянного тока широко используют в системах автоматики, так как они позволяют плавно регулировать частоту вращения, получать практически любые скорости и менять направление вращения (реверсироваться). Первый электродвигатель постоянного тока был создан в России акад. Б. С. Якоби в 1834 г.
Конструктивная схема
двигателя постоянного тока представлена на рис.1. 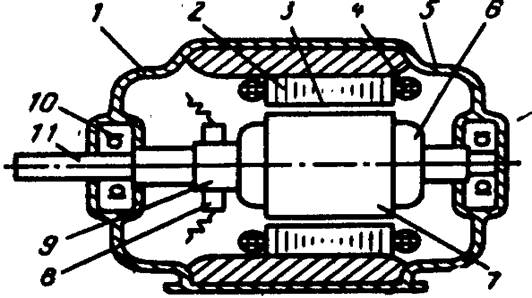
Двигатель состоит из станины 1 цилиндрической формы с закрепленными на ней полюсами 2 (для улучшения формы магнитного поля машины полюсы заканчиваются полюсными наконечниками 3); статорной обмотки 4, охватывающей полюс; сердечника ротора 7, запрессованного на вал 11; обмотки ротора 6 из отдельных секций, концы которых подсоединены к пластинам коллектора 9. Напряжение постоянного тока на секции ротора подается через угольные щетки 8, скользящие по коллектору. Вал ротора вращается в подшипниках 10, укрепленных в подшипниковых щитах 5.
Электромагнитные
полюсы статора создают магнитный поток Ф, пронизывающий секции обмотки ротора,
по которым протекает электрический ток I. В результате взаимодействия магнитного потока Ф с
электрическим током I возникает .вращающий момент, и ротор (якорь) будет
вращаться в электромагнитном поле с частотой n. Вращающий момент М
пропорционален магнитному потоку статора Ф и току I, протекающему в обмотке
якоря:  , где Км — постоянный коэффициент.
, где Км — постоянный коэффициент.
Ток в обмотках полюсов называется током возбуждения. Электрические исполнительные двигатели чаще всего работают в режиме с частыми пусками, остановами, сменой направления вращения (реверсированием), изменением частоты вращения, поэтому при их разработке большое внимание уделяется механическим характеристикам, иногда даже в ущерб их КПД.
Одним из основных
требований к исполнительным двигателям является простота регулирования частоты
его вращения. При вращении якоря проводники его обмотки пересекают линии магнитного
поля машины, и в них наводится ЭДС, значение которой зависит от частоты
вращения якоря n, магнитного
потока Ф и постоянного для каждого двигателя коэффициента КЕ, учитывающего
конструкцию машины и схему обмотки якоря ![]() .
.
В неподвижном якоре ЭДС Е равна 0, и в момент пуска в якоре проходит пусковой ток, превышающий номинальный в 10—20 раз. Для ограничения пускового тока в цепь якоря включают ограничительный пусковой реостат. Сопротивление реостата выбирают таким, чтобы пусковой ток Iпуск не превышал номинальный больше, чем в 3—4 раза. С нарастанием частоты вращения якоря двигателя растет величина Е, а ток в обмотке якоря уменьшается, поэтому необходимо постепенно уменьшать сопротивление пускового реостата. Выведение пускового реостата осуществляется вручную или автоматически. При пуске двигателей малой мощности пусковые реостаты обычно не включают, так как время разгона двигателя до номинальной скорости невелико и обмотка якоря не успевает нагреться большим пусковым током.
Частоту вращения двигателя можно регулировать одним из следующих четырех способов: путем изменения: 1) напряжения питания Uy
2) активного сопротивления в цепи якоря R; 3) магнитного потока Ф; 4) действующего значения тока якоря при питании якорной обмотки импульсами различной длительности.
Регулирование частоты вращения первым способом осуществляется либо с помощью специального генератора, выходное напряжение которого можно плавно изменять, либо делением напряжения потенциометром, либо изменением выходного напряжения усилителя.
Второй способ регулирования скорости — путем изменения сопротивления цепи якоря — является надежным и простым. Однако при этом значительная часть мощности теряется на нагрев регулировочного реостата. Простым и экономичным является третий способ регулирования частоты вращения — изменением магнитного потока возбуждения Ф с помощью реостатов в цепи обмоток возбуждения или с помощью усилителей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.