 ,
,
где ![]() ,
,  – соответственно максимальная и
минимальная из дисперсий эталонного и программируемого случайных процессов.
– соответственно максимальная и
минимальная из дисперсий эталонного и программируемого случайных процессов.
Вычисленное значение F
сравнивалось с табличным, Fтабл , при данном для каждой
дисперсии числе степеней свободы и избранном уровне значимости риска. Число
степеней свободы для дисперсии D0 принималось равно
бесконечности, а для ![]() принималось равным длине
массива в задаче моделирования. Во всех случаях имитационного моделирования F
< Fтабл, следовательно, различие между дисперсиями эталонного
и моделируемого случайных процессов можно считать несущественным.
принималось равным длине
массива в задаче моделирования. Во всех случаях имитационного моделирования F
< Fтабл, следовательно, различие между дисперсиями эталонного
и моделируемого случайных процессов можно считать несущественным.
Таким образом, основные метрологические характеристики переходных процесса в робастной системе разбиваются на две группы:
1. Метрологические характеристики информационно-измерительной подсистемы, основное назначение которых - это обеспечение заданной точности измерения всех параметров робастной системы [64];
2. Метрологические характеристики управляющей подсистемы, основное назначение которых является количественная оценка потерь образующихся в процессе управления (см. глава 3); следует считать, что именно период управления, ТУ, связывает метрологические характеристики модулей УСО в робастной системе в единые количественные оценки качества как алгоритмов текущей идентификации, так и алгоритмов визуализации процессов измерения и управления.
4.1 Метрологические характеристики измерительной подсистемы
Согласно схеме выделения случайной функции ошибки цифровой обработки измерительной информации (см. рис. 4.5 и [7, 58, 64]) фактический эффект воздействия информационного дискретно-непрерывного канала на исходный непрерывный случайный процесс естественно рассматривать по отношению к результату применения желаемой непрерывной линейной операции (передачи, фильтрации) к исходному непрерывному сигналу. Реализация соответствующей случайной функции ошибки (рис. 4.5) может быть представлена в виде:
![]() ,
,
где ![]() и
и ![]() –
частные реализации выходного сигнала реального дискретно-непрерывного и эталонного
каналов. Для наиболее часто встречаемых, в технических системах, допущений о
нормальности и стационарности (по крайней мере, в широком смысле)
исходного измеряемого сигнала, в силу
линейности его преобразований в функции
–
частные реализации выходного сигнала реального дискретно-непрерывного и эталонного
каналов. Для наиболее часто встречаемых, в технических системах, допущений о
нормальности и стационарности (по крайней мере, в широком смысле)
исходного измеряемого сигнала, в силу
линейности его преобразований в функции ![]() и
и ![]() , случайная функция ошибки
, случайная функция ошибки ![]() также является нормальной и стационарной. Стационарность случайной функции ошибки
также является нормальной и стационарной. Стационарность случайной функции ошибки ![]() по математическому
ожиданию следует непосредственно из стационарности по математическому ожиданию
исходного процесса
по математическому
ожиданию следует непосредственно из стационарности по математическому ожиданию
исходного процесса  [7, 20, 34]:
[7, 20, 34]: ![]() . Предполагая весовую функцию эталонного канала
. Предполагая весовую функцию эталонного канала
![]() нормированной:
нормированной:  и
используя равенство
и
используя равенство ![]() , получаем:
, получаем:

 .
.
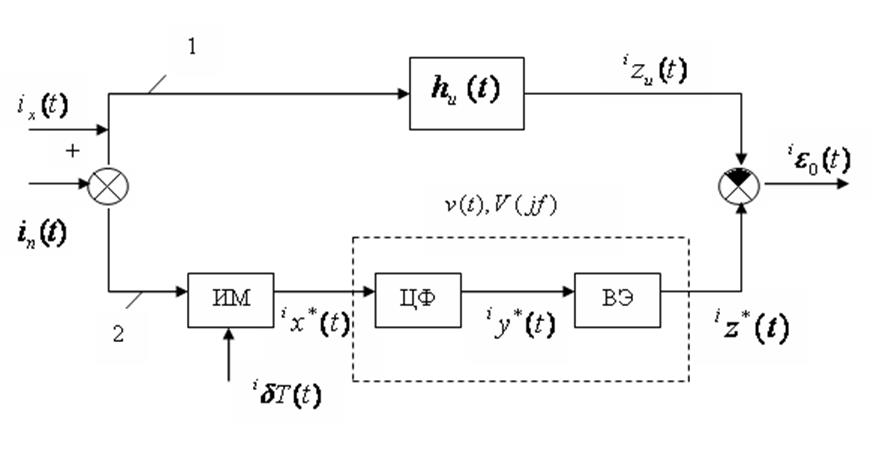
Рис.
4.5 Схема выделения случайной функции ошибки ![]() (ИМ –
импульсный модулятор, ЦФ – программный фильтр; ВЭ – восстанавливающий элемент).
(ИМ –
импульсный модулятор, ЦФ – программный фильтр; ВЭ – восстанавливающий элемент).
Если все вероятностные
свойства случайной функции ![]() определены, то
известна корреляционная функция ошибки
определены, то
известна корреляционная функция ошибки ![]() [Ш]:
[Ш]:

 .
(4.13)
.
(4.13)
Отсюда, в частности, с учетом
соотношения  для дисперсии ошибки имеем [64]:
для дисперсии ошибки имеем [64]:



 . (4.14)
. (4.14)
Корреляционную функцию ошибки Кε(τ) можно представить также через соответствующие характеристики в частотной области [58]:

 . (4.15)
. (4.15)
Отсюда дисперсия ошибки определяется выражением:
 .
(4.16)
.
(4.16)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.