На рис.2 приведена схема автоматического электронного моста, который состоит из мостовой измерительной схемы ИС, электронного усилителя А и балансирующего двигателя М. Параметрический датчик включен в одно из плеч мостовой измерительной схемы. При определенном значении Rt мостовая схема сбалансирована, и напряжение разбаланса Uнб равно нулю. Если сопротивление на выходе датчика изменится, то мост окажется несбалансированным (Uнб¹0), на выходе усилителя появится напряжение, которое приводит во вращение двухфазный асинхронный реверсивный двигатель М. Последний кинематически связан с движком реохорда Rр и перемещает его движок в ту или другую сторону до тех пор, пока снова не установится равновесие моста, после чего двигатель останавливается. Таким образом осуществляется непрерывное балансирование измерительной схемы.
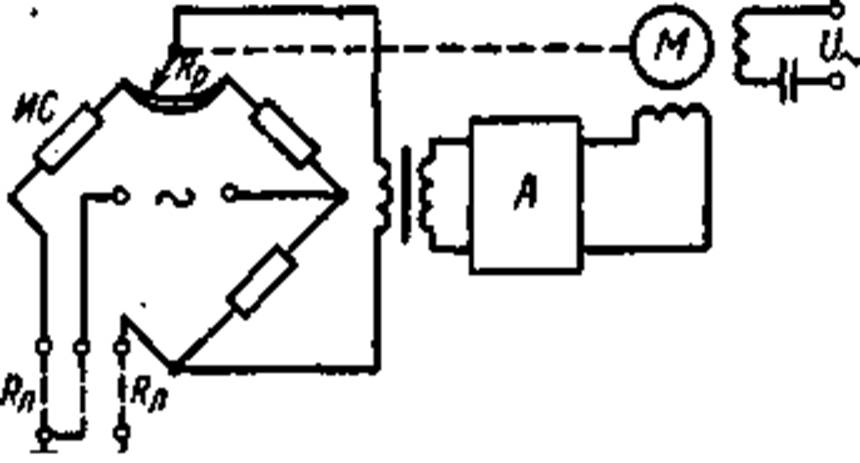
Рис. 2. Принципиальная схема электронного автоматического уравновешенного моста
Вместе с движком реохорда перемещаются связанные с ним указательная стрелка и записывающее перо. Перемещение движка реохорда прямо пропорционально изменению сопротивления Rt датчика. Если сопротивление датчика связано с контролируемым технологическим параметром линейной зависимостью, шкала моста в единицах измерения этого параметра будет равномерной.
В производственных условиях автоматический мост может быть расположен на значительных и притом различных расстояниях от датчика. Наличие соединительных проводов с различными сопротивлениями Rл, к тому же сильно зависимыми от температуры окружающей среды, приводит к появлению значительных погрешностей измерения. Для исключения влияния колебаний сопротивления соединительных проводов на показания автоматического моста последний соединяют с датчиком трехпроводной линией. При таком способе включения датчика один соединительный провод оказывается включенным в одно плечо моста, а другой — в другое, смежное. Так как оба соединительных провода идут рядом, то их температура и, следовательно, сопротивления изменяются одинаково. Поэтому при включении соединительных проводов в смежные плечи мостовой схемы равновесие ее при изменении этих сопротивлений не нарушается. Для уменьшения влияния внешних наводок третий соединительный провод включают в диагональ источника питания.
В большинстве случаев измерительная схема питается переменным током. Это исключает необходимость применения вибропреобразователя. Автоматические мосты с питанием измерительной схемы постоянным током по устройству более сложные, поэтому их применяют только в тех случаях, когда мосты переменного тока не могут быть использованы, например, во взрывоопасных производствах. В описанных автоматических потенциометрах и мостах балансирование измерительных схем происходит непрерывно.
Наряду с этим имеются такие автоматические компенсаторы, в которых балансирование происходит периодически. Равенство между выходной величиной датчика Ux и уравновешивающей величиной носит периодический характер. Циклический характер работы таких систем позволяет использовать их для поочередного включения многих датчиков. Сущность периодического балансирования рассмотрим на примере автоматического компенсатора (рис.3), состоящего из измерительной схемы, нуль-индикатора, балансирующего органа и выходного устройства. Измерительная схема, представляет собой мост, два плеча которого являются круговым потенциометром Rр (реохорд), а два других — резисторный датчик Rд. Балансирующий орган представляет собой двигатель М, кинематически связанный с движком D реохорда Rр. Нуль-индикатором служит поляризованное реле ПР, включенное в диагональ моста. Контакты реле управляют цепью электромагнитного привода ЭМ, выходного устройства П (перо), служащего для записи результатов измерения величины Uх.
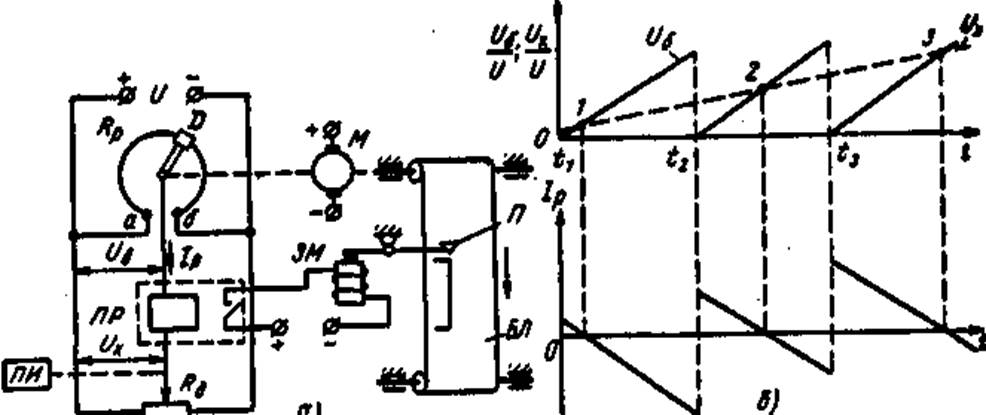
Рис.3 Автоматическая измерительная система периодического балансирования а — схема; б — временные диаграммы
Балансирующий орган представляет собой генератор периодически изменяющегося уравновешивающего напряжения Uб. Двигатель с постоянной скоростью вращает движок реохорда. Снимаемое с движка и с одного конца реохорда (точка а) напряжение U6 изменяется циклически по пилообразной кривой: меняется от нуля до максимума, после чего мгновенно спадает до нуля и снова возрастает пропорционально времени и т. д. Для каждого значения измеряемого напряжения Ux имеется момент (точки 1,2,3,...), когда наступает равенство Uб == Ux, т. е. мост оказывается сбалансированным. В этот момент ток Iр в диагонали моста равен нулю. При дальнейшем возрастании Uб ток Iр начнет увеличиваться, но уже протекать будет в обратном направлении.
В моменты, когда Iр=0, реле ПР размыкает свой контакт и разрывает цепь питания электромагнитного привода ЭМ пера П, перо поднимается над бумажной лентой БЛ, и вычерчивание линии на ленте, начатое в момент начала цикла (t1, t2, t3), прекращается. Длина линии L, прочерченной пером на ленте, пропорциональна интервалу времени между началом цикла и моментом равенства Uб == Ux. Это значит, что отрезок L в определенном масштабе пропорционален измеряемой величине Uх.
Описанный метод периодического балансирования лежит в основе так называемых время-импульсных преобразователей, используемых в телеизмерительных системах.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.