|
|
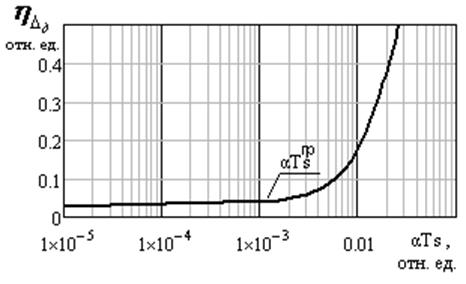
Рис. 4.26 - Погрешности от скважности массивов, TS.
Затем, по величине
относительной погрешности ![]() , выбирается фильтрующая
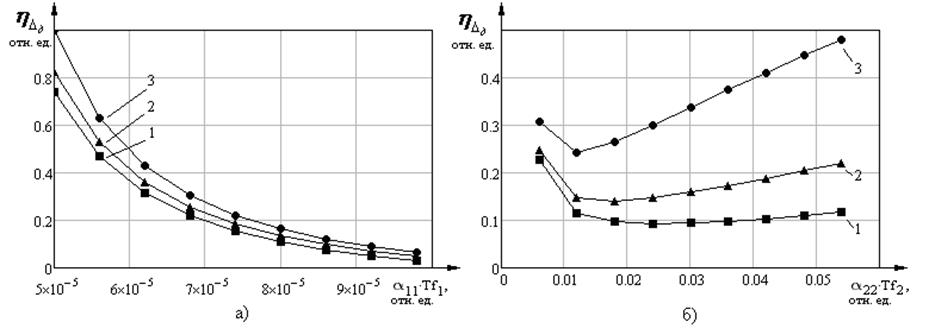
способность измерительного канала для измерения управляющего воздействия, Tf1 (см. рис.4.26а). По этой же величине
относительной погрешности
, выбирается фильтрующая
способность измерительного канала для измерения управляющего воздействия, Tf1 (см. рис.4.26а). По этой же величине
относительной погрешности ![]() , выбирается фильтрующая
способность измерительного канала для измерения критерия управления, Tf2 (см. рис.4.26б).
, выбирается фильтрующая
способность измерительного канала для измерения критерия управления, Tf2 (см. рис.4.26б).
|
|
Рис. 4.27 Фильтрующая способность измерительного канала
На четвёртом шаге, используя настройки измерительного канала, полученные на предыдущем шаге, как начальные условия, проводится оптимизация настроечных параметров аналоговой части измерительного канала. Задача оптимизации настроечных параметров аналоговой части типового измерительного канала, при этом, выглядит следующим образом [19]:
 ,
,
где αmax и αmin – соответственно наибольшая и
наименьшая из скоростей изменения полезного сигнала; ТС –
время измерения (настройка АЦП, обычно 1 секунда); TP – постоянная времени первичного
преобразователя; Tf – постоянная времени предварительного аналогового фильтра. По
математической модели формирования динамической погрешности ![]() в типовом измерительном канале [9, 12, 24]
находятся настройки аналоговой части измерительного канала. Для самого
распространенного на практике случая, когда аддитивно наложенная помеха
является высокочастотной (белый шум) целевая функция оптимизации имеет
следующий вид [64]:
в типовом измерительном канале [9, 12, 24]
находятся настройки аналоговой части измерительного канала. Для самого
распространенного на практике случая, когда аддитивно наложенная помеха
является высокочастотной (белый шум) целевая функция оптимизации имеет
следующий вид [64]:
где DX– оценка дисперсии измеряемого
сигнала, α – скорость изменения полезного сигнала, S – уровень помехи, ТP– постоянная времени первичного
преобразователя датчика, q–
уровень квантования сигнала, TS – темп обработки информации в измерительном канале, Tf– постоянная времени аналогового фильтра,
![]() – решётчатая взаимокорреляционная
функция случайных последовательностей показаний эталонного, Y[iTS] , и виртуального, Z(iTS), приборов при нулевом значении аргумента.
– решётчатая взаимокорреляционная
функция случайных последовательностей показаний эталонного, Y[iTS] , и виртуального, Z(iTS), приборов при нулевом значении аргумента.
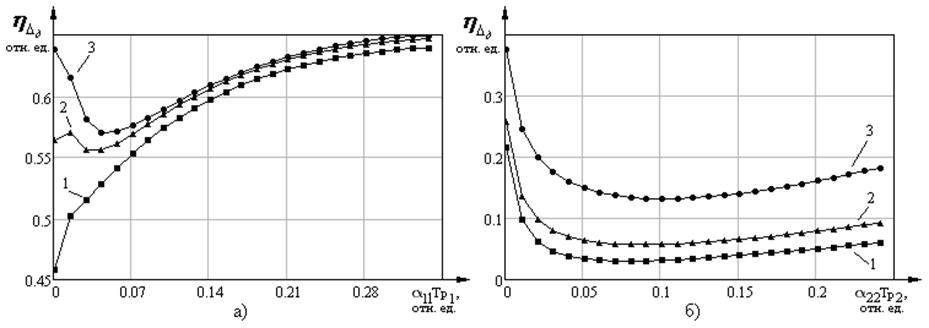
Блок-схема алгоритма поиска оптимальных настроек измерительного канала представлена на рис. 4.29. Алгоритм состоит из трех основных блоков: блока формирования исходных данных, блока отыскания постоянной времени первичного преобразователя, TP с заданной точностью и блока отыскания постоянной времени предварительного аналогового фильтра Tf по условию достижения минимума динамической погрешности. Если имеется несколько типовых измерительных каналов, объединенных с помощью уравнения измерения в единую измерительную систему, то производится поиск оптимальных параметров функционирования каждого типового канала в отдельности. Из рисунка 4.28 видно, как существенно отличаются настройки одного и того же первичного преобразователя. Если он установлен на входе в объект управления (см. рис. 4.28а), то оптимальная настройка находится в области больших погрешностей. Если первичный преобразователь установлен на выходе из объекта управления (см. рис. 4.28б) то оптимальная настройка находится в области более меньших погрешностей. Так влияют динамические свойства объекта управления на оптимальные настройки аналоговой части виртуального прибора.
|
|
Рис. 4.28 Погрешности, вносимые первичными преобразователями
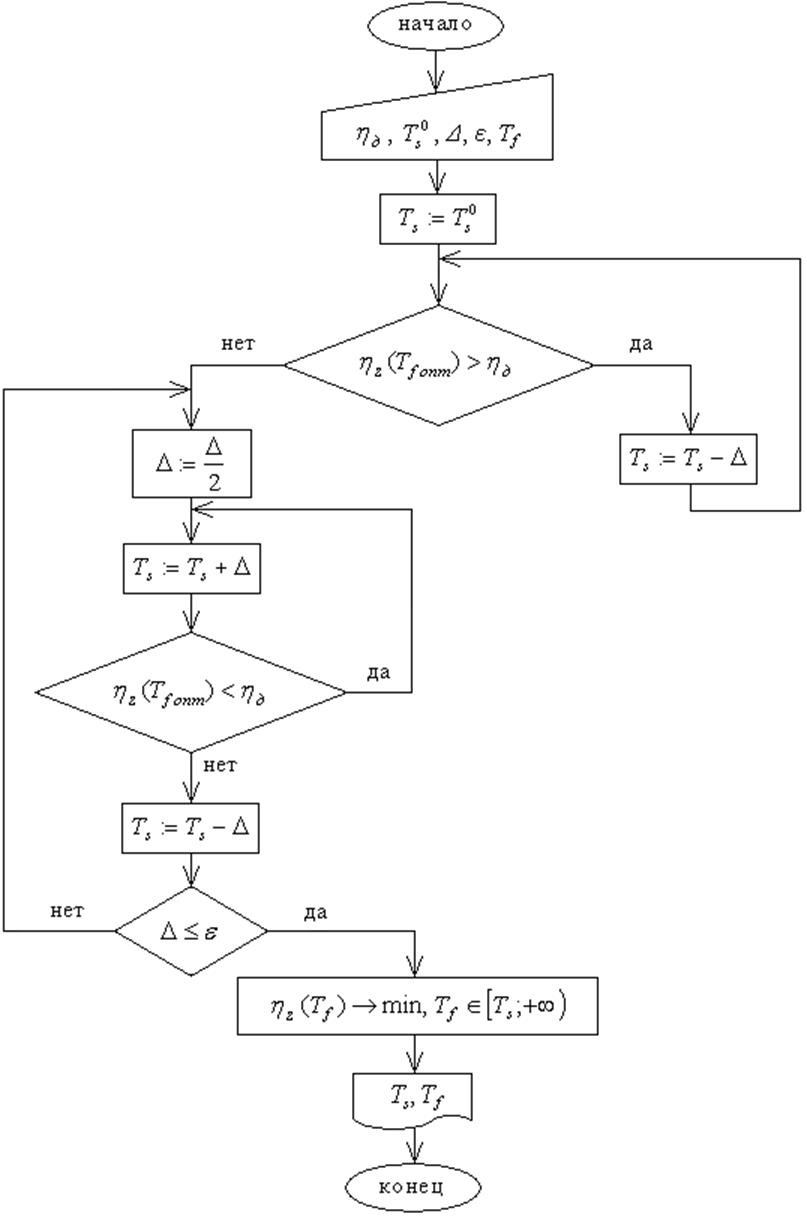
Рис. 4.29. Покоординатный поиск настроек виртуального прибора
На пятом шаге проводится
имитация работы виртуального прибора на стенде [29] для диагностики
программного обеспечения, где производится оценка основных метрологических
характеристик программно-аппаратного измерительного канала, а именно: оценки дисперсии последовательности показаний
виртуального прибора, ![]() , оценки взаимокорреляционной
функции показаний эталонного прибора, Y(iTS) и показаний виртуального
прибора, Z(iTS), оценки дисперсии показаний эталонного
прибора,
, оценки взаимокорреляционной
функции показаний эталонного прибора, Y(iTS) и показаний виртуального
прибора, Z(iTS), оценки дисперсии показаний эталонного
прибора, ![]() , оценки дисперсии
последовательности ошибок цифровой обработки измерительной информации,
, оценки дисперсии
последовательности ошибок цифровой обработки измерительной информации, ![]() . На стенде можно, так же ,
вычислять текущие значения динамической погрешности переходного процесса при
адаптивном управлении:
. На стенде можно, так же ,
вычислять текущие значения динамической погрешности переходного процесса при
адаптивном управлении:  , или усредненное
значение относительной среднеквадратической погрешности отклонения переходного
процесса при адаптивном управлении от эталонного переходного процесса:
, или усредненное
значение относительной среднеквадратической погрешности отклонения переходного
процесса при адаптивном управлении от эталонного переходного процесса:
 .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.