На рисунке 4.10 представлено
поле ошибок идентификации взаимокорреляционной функции, из которого видно, что
расчётное поле значений ошибок идентификации расположено вокруг статической
характеристики технической системы и определяет удалённость рабочей точки ![]() от экстремума при управлении по
градиентным и безмодельным алгоритмам управления.
от экстремума при управлении по
градиентным и безмодельным алгоритмам управления.
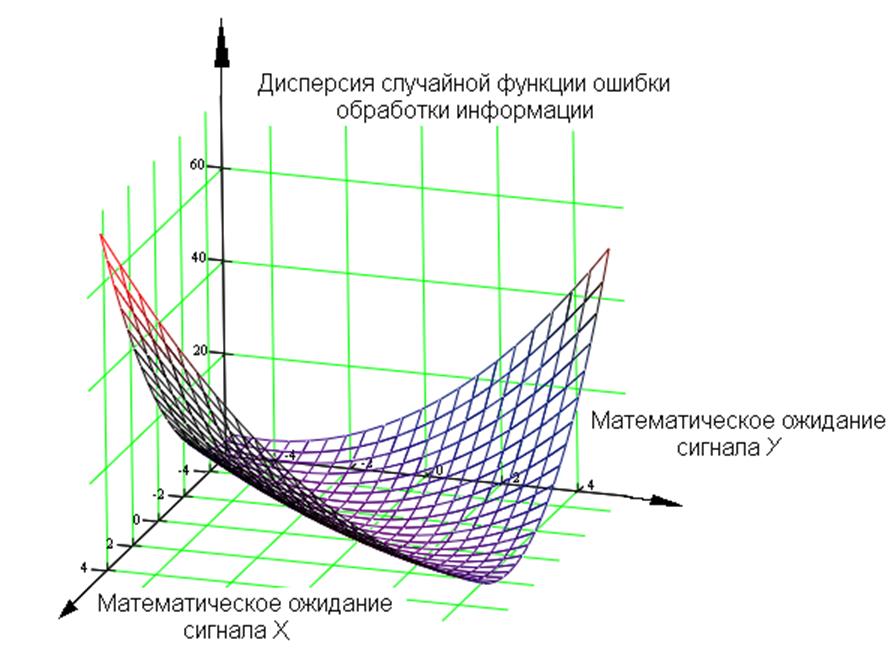
Рис. 4.10 Поле ошибок идентификации KXY(iTS)
Кроме того, (см. рис. 4.10) статическая методическая погрешность идентификации равна нулю. Это связано с процессами линеаризации и подчёркивает тот факт, что на погрешность идентификации большое влияние оказывает фиксация положения рабочей точки на протяжении всего периода идентификации.
Метрологические свойства идентификатора [27], как виртуального прибора, оцениваются тремя основными метрологическими характеристиками. Для количественной оценки дисперсии показаний идентификатора можно использовать математическую модель (4.34), которая получена для случая измерения коррелированных сигналов [64], каковыми и являются входные и выходные координаты динамического объекта управления:



 . (4.34)
. (4.34)
При этом взаимокорреляционная функция показаний эталонного вычислителя и показаний идентификатора будет иметь вид [64]
 , (4.35)
, (4.35)
а, дисперсия ошибок идентификации взаимокорреляционной функции будет равна [64]:

 . (4.36)
. (4.36)
В моделях (4.34 -:- 4.36): Aij– это матрица коэффициентов линеаризации; TS – единый период дискретизации всех функций времени; To – постоянная времени объекта управления; Tpi– постоянные времени динамических характеристик эталонных преобразователей; αij– диагональная матрица скоростей изменения измеряемых величин; E[t/TS] – дискретное время (операция взятия целой части числа); Sij– диагональная матрица уровней помех измерения; Kij(0) – корреляционная матрица измеряемых сигналов при t=0 (диагональные элементы – это дисперсии измеряемых сигналов, все остальные элементы матрицы – это значения взаимокорреляционной функции показаний эталонной измерительной системы и идентификатора).
Таким образом, модели (4.31 -:- 4.36) – это основные метрологические характеристики программного обеспечения прибора предназначенного для идентификации корреляционных функций и динамических свойств объекта управления. Прибор состоит из первичного преобразователя (полевой изменяемый прибор [27]), который производит опрос входных и выходных координат объекта управления, расчет корреляционных функций и их визуализацию. Оператор анализирует внешний вид корреляционных функций и принимает решение о наличии взаимосвязи координат. Если взаимосвязь обнаружена, то проводится текущая идентификация динамических свойств объекта управления.
Проверка работоспособности прибора и
адекватности математических моделей метрологических характеристик проводилась
на стенде для диагностики программного обеспечения виртуальных приборов,
созданного специально для этих целей [29], по методикам из работы [23].
Информационно-измерительные каналы стенда (см. рисунок 4.11) реализуют чистую
передачу измерительной информации, которая имитируется в автоматизированном
рабочем месте (см. гл. 4.4). Поэтому метрологические характеристики эталонного
вычислителя и идентификатора полностью определяются элементами стенда, эталонной
моделью объекта управления и режимами цифровой обработки информации. При
моделировании измерительной системы, статическая характеристика датчиков
измерительной информации принималась линейной с коэффициентом передачи равным
единица, то есть Y(t) =X(t). Динамические свойства датчика измерительной
информации принимались в виде апериодического звена первого порядка  , где Kp – коэффициент передачи,
Tp– время. Для
процесса формирования дисперсии погрешности идентификации эталонного
переходного процесса, как решения однородного линейного дифференциального
уравнения первого порядка
, где Kp – коэффициент передачи,
Tp– время. Для
процесса формирования дисперсии погрешности идентификации эталонного
переходного процесса, как решения однородного линейного дифференциального
уравнения первого порядка  , который может быть
представлен в виде решётчатой функции:
, который может быть
представлен в виде решётчатой функции:  , где
ТSУ – скважность решётчатой функции
идентификатора, ТO и KO – параметры эталонной модели объекта
управления.
, где
ТSУ – скважность решётчатой функции
идентификатора, ТO и KO – параметры эталонной модели объекта
управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.