ЗАДАНИЕ 2. АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ ПОТОЧНО-ТРАНСПОРТНЫМИ СИСТЕМАМИ.
Автоматизация транспортных работ осуществляется на базе специального класса транспортных роботов и манипуляторов. С помощью этих устройств и соответствующих систем управления организуется два материальных потока: поток заготовок (деталей) и поток инструмента. Транспортными системами может управлять либо автономная система программного управления, либо подсистема оперативного управления, входящая в общую систему управления. При проектировании транспортной системы существенное значение приобретают вопросы ее оптимизации за счет выбора целесообразных маршрутов и алгоритмов управления.
Манипулятором называют дистанционно управляемое устройство, включающее рабочий орган, используемый для имитации перемещений и рабочих функций руки оператора.
Управление манипулятором производится либо оператором—ручной режим, либо программным устройством—автоматический режим.
Промышленным роботом является автоматическое устройство, включающее манипулятор и перепрограммируемое устройство управления для выполнения функций перемещения н установки предметов производства, технологической оснастки, оборудования и т. п.
Характерной особенностью промышленного робота является наличие гибкой системы логико-программного управления, которая, как правило, строится на базе микропроцессорной техники.
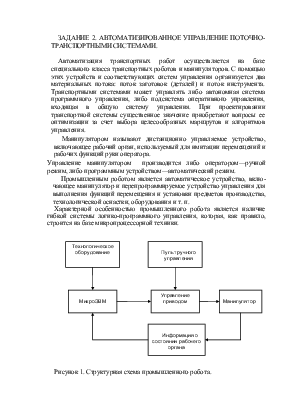
Рисунок 1. Структурная схема промышленного робота.
Рабочим органом манипулятора является захват, имитирующий кисть человека и обеспечивающий фиксацию и утверждение объекта манипулирования.
В процессе выполнения рабочих операций манипулятор (робот) обеспечивает перемещение и укладку заготовок и деталей, установку оснастки и инструмента — объектов манипулирования в рабочей зоне. Рабочей зоной манипулятора является область пространства, к которой имеет доступ захват (кисть) манипулятора.
Структурная схема робота показана на рис.1. Манипулятор робота связан с системой управления через блоки управления приводами и преобразователей информации от датчиков положения в числовой код. Основу системы управления составляет микроЭВМ, обеспечивающая анализ состояния технологического оборудования, обслуживаемого роботом, и рабочего органа манипулятора, формирование и выдачу команд управления приводами манипулятора. Подготовка управляющих программ робота может выполняться в двух режимах — базовом и адаптивном (следящем). В базовом режиме предварительно планируются технологические операции и способы взаимодействия с технологическим оборудованием, затем составляется программа. В адаптивном режиме программа движений манипулятора готовится с использованием пульта ручного управления. При этом фиксируются все движения манипулятора, которые впоследствии будут выполняться под управлением микроЭВМ.
Современные роботы и манипуляторы используют три основных способа позиционирования рабочего органа: 1) по упорам; 2) по зафиксированному числу точек; 3) в произвольной точке рабочего пространства.
Схема позиционирования рабочего органа по упорам связана с цикловой системой управления. При этом процессе подготовки манипулятора к работе заранее фиксируются базовые точки пространства, выставляются упоры, ограничивающие движение манипулятора в определенном направлении, и производится программирование движений и действий захвата.
При способе установки рабочего органа манипулятора по зафиксированному числу точек применяют позиционную систему управления. В этом случае осуществляется движение рабочего органа по заданным точкам без контроля траектории движения. Остановка рабочего органа производится при срабатывании одного (заданного) из путевых датчиков, установленных на звеньях манипулятора.
Для позиционирования рабочего органа манипулятора в произвольной точке применяют контурную систему управления. Такая система позволяет осуществлять движение рабочего органа по заданной траектории с установленным распределением значений скорости и ускорений во времени,
Число степеней подвижности манипулятора определяет возможные виды движений и формы траекторий рабочего органа.
Для классификации роботов и манипуляторов применяют различные конструктивные признаки — вид системы управления, степень универсальности, способ позиционирования рабочего органа, число степеней подвижности и др.
По виду системы управления выделяются манипуляторы с ручным и полуавтоматическим (супервизорным) управлением, промышленные роботы с автоматическим управлением. При ручном управлении манипулятор копирует действия руки оператора. Полуавтоматическое управление реализуется чередованием ручного и автоматического управления отдельных частей рабочего цикла. В процессе автоматического управления все функции робота осуществляются без участия оператора.
По степени универсальности роботы и манипуляторы делятся на три группы — универсальные, специализированные и специальные. Универсальные манипуляторы (роботы) могут быть использованы для различных технологических целей. Универсальность обеспечивается быстрым перепрограммированием устройства управления, набором различных захватов и возможностью переключения на различные режимы работы. Специализированные манипуляторы (роботы) предназначены для выполнения определенных операций. Специальные манипуляторы работают по зафиксированной программе, выполняя простую операцию.
В практике наибольшее распространение получили манипуляторы с числом степеней свободы от 3 до 7. Механическая система манипуляторов реализует три группы движений — общие, региональные и локальные.
Общие движения манипулятора связаны с его перемещением в пределах цеха, завода.
Региональная подвижность манипулятора определяется перемещениями рабочего органа при неподвижном основании. Локальные движения ориентируют кисти и производят захват объекта манипулирования.
Грузоподъемность манипулятора является одной из основных технических характеристик, определяющих сферу его применения.
По виду привода манипуляторы изготавливаются с электро-, гидро- и пневмодвигателями. В качестве двигателей прямолинейного перемещения используются гидро- и пневмоцилиндры, линейные электродвигатели. Для обеспечения вращательных движений применяют пневмо- и электродвигатели, гидромоторы, роторные и радиально-поршневые двигатели.
Выбор манипуляторов и роботов производится на основе следующих требований: необходимых функций по отношению к выполняемой операции и внешней среде, грузоподъемности, простоте конструкции, технологичности применения, минимальной стоимости, виду привода, точности позиционирования и т, п.
Следует отметить, что в процессе выбора робототехнических средств приходится разрешать целый ряд противоречий, заложенных в требования. Выбор манипуляторов или роботов начинается с анализа требований технологического процесса. При этом предпочтение может быть отдано манипуляторам с гидравлическим приводом. В ряде случаев, где не требуется высокая грузоподъемность (например, при ультразвуковом контроле качества изделий), целесообразно применять манипуляторы с пневматическим приводом. Для выполнения высокоточных операций с большой степенью гибкости применяется электрический привод.
Системы управления манипуляторами позволяют автоматизировать работу манипулятора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.