Стремление уменьшить угол атаки после выхода на aoptуст у самолета обусловлено тем, что ненулевая wZсх требует установки органов продольного управления в положение, обеспечивающее невыход за aoptуст. Очевидно, что это положение органов управления не является балансировочным на aoptуст, а, с учетом ненулевой wZсх, такое положение будет вызывать пикирующий момент после выхода на данный угол атаки. По этой причине летчику необходимо вносить опережение при управлении. От того, какие характеристики управляемости будет иметь самолет на данном режиме, зависит величина “провала” по углу атаки относительно aoptуст, а следовательно и величина qmin. Простота выполнения задачи стабилизации заданного угла атаки во многом зависит от наличия на борту самолета демпфера тангажа, который своей работой “сглаживает и уменьшает” отклонения ручки управления, потребные при стабилизации.
При выполнении трамплинного взлета возможны два способа управления: активный и пассивный. При активном способе летчик (или автомат) старается максимально быстро выйти на заданный угол атаки, при этом он не должен допускать больших забросов по a, поскольку это немедленно приведет к уменьшению qmin. Данный способ управления для летчика довольно сложен в реализации. Кроме того, для такого способа управления требования к характеристикам управляемости самолета должны быть высокими.
При пассивном способе управления летчик заранее отклоняет ручку управления в заданное положение, обеспечивающее выход на aoptуст. Этим обеспечивается простота управления, однако при таком способе управления тоже есть определенный недостаток, правда, устранимый после проведения тренажа. Дело в том, что при наезде на трамплин на самолет действуют переменные перегрузки, особенно nx, причем n¢x<0.
Скачкообразное воздействие перегрузок приводит к непроизвольной отдаче ручки управления от себя, то есть возможен невыход на aoptуст, что приведет к необходимости добора a. В итоге это уменьшит qmin, а в условиях взлета с предельно допустимыми параметрами траектории такой эффект может стать критичным. Для максимального ослабления такой непроизвольной отдачи ручки управления необходимо иметь хорошие характеристики устойчивости и управляемости. При условии взлета с боковым ветром потеря подъемной силы за счет колебаний по крену в зависимости от амплитуды крена также приведет к уменьшению qmin. Поэтому, самолет должен обладать хорошими характеристиками устойчивости и управляемости и в боковом движении.
3. Отказ двигателя.
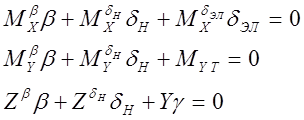
При одностороннем отказе двигателя, двигатель, работающий с другой стороны плоскости симметрии, создаёт момент силы тяги МY T относительно оси Оу. Этот момент лётчик парирует, отклоняя руль направления в результате чего появляется боковая сила ZH на вертикальном оперении. Чтобы уравновесить эту силу, лётчик должен накренить самолёт на некоторый угол g.
Предполагая, что углы g и b небольшие, условия равновесия сил и моментов и проекций сил на нормаль к траектории, лежащую в горизонтальной плоскости, можно записать в следующем виде:
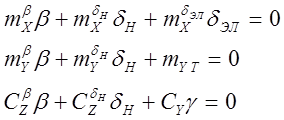
Перейдем от сил и моментов к коэффициентам, для чего разделим все члены двух первых уравнений на Sql, а третьего уравнения – на Sq; получим
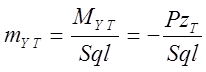
Коэффициент момента силы тяги
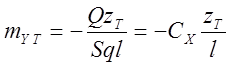
В случае горизонтального установившегося полёта, когда сила тяги уравновешивает силу лобового сопротивления, получим
 .
.
Выражая неизвестные через угол b,получим
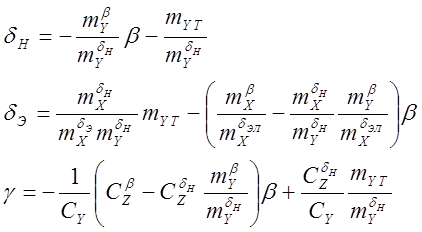
Следовательно, для поддержания прямолинейного установившегося полета в случае отказа двигателя можно применять самые различные способы пилотирования: самолёт может лететь со скольжением в сторону работающего или остановившегося двигателя и соответственно с различными углами крена.
4. Моделирование в системе САПР «Динамика».
В период прохождения преддипломной практики в целях освоения САПР «Динамика» были выполнены практические работы, связанные с моделированием движения проектируемого самолёта в продольном и боковом канале.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.