Органы управления, расположенные на Ш панели станка, показаны на рис.6.3: 1 - переключатель ежимов работы охлаждения, 2 -крестовый переключатель по X иZ, 3 - выход в "0", 4 – кнопка
Вторая панель управления
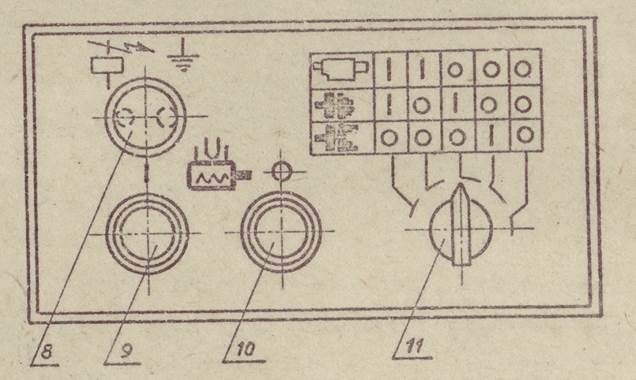
Рис. 6.2
Третья панель управления
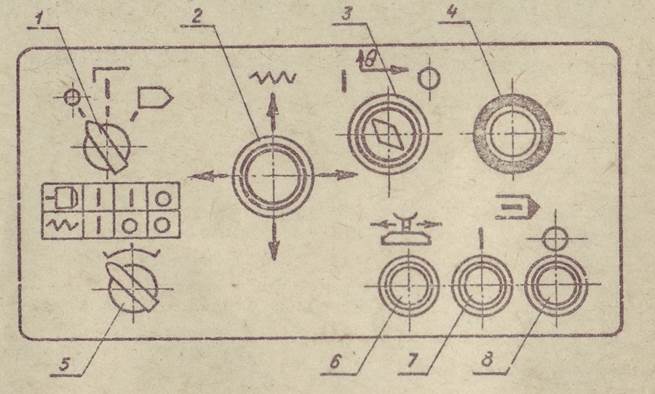
Рис. 6.3
"аварийный останов", 5 - переключатель "Пуск", "Стоп" шпинделя и подачи, 6 - кнопка "схода с аварийного кулачка".
7. Применяемый режущий инструмент
Для выполнения разнообразных операций на станке 16К20РФ3С19применяются укороченные с регулировочными винтами резцы. Все они являются сборными и в большинстве оснащаются многогрешными пластинками из твердого сплава.
Для обработки отверстий применяют сверла, зенкеры, развертки обычного исполнения, а также с цилиндрическим хвостовиком, поводком к винтом для установки их вылета.
Для крепления инструмента применяют инструментальные державки, оправки и резцовые блоки.
8. СХЕМА СТАНКА
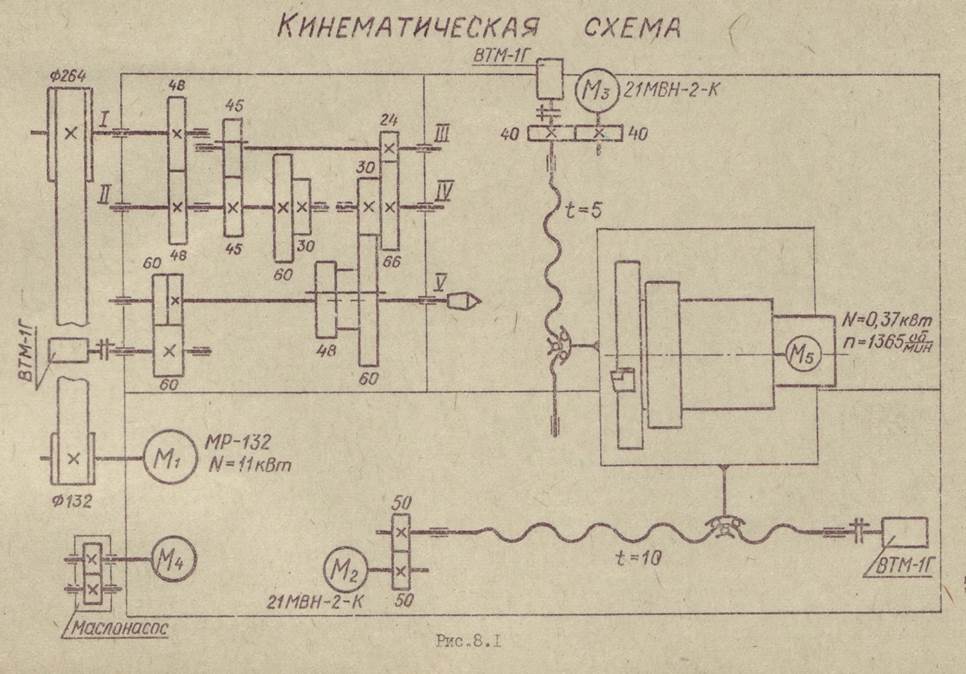
8.1. Главное движение.
Вращение от регулируемого электродвигателя постоянного тока с тиристорным управлением мощностью 11 кВт, номинальной частотой вращения – nном = 1000 об/мин и максимальной частотой вращения - nmax= 3500 об/мин, передается через поликлиновую ременную передачу, трехступенчатую коробку скоростей на шпиндель станка (рис.8.1).
Коробка с трехступенчатой передачей, переключаемая вручную, создает три передаточных отношения:

образуя три диапазона частот вращения шпинделя.
Первый диапазон — 22.4-315; второй диапазон — 63-900; третий диапазон — 160-2240 об/мин. В каждом диапазоне с помощью тиристорного преобразователя осуществляется бесступенчатое регулирование частоты вращения двигателя постоянного тока. Такая конструкция привода позволяет создать широкий общий диапазон при постоянном крутящем моменте на низких и при постоянной мощности на высоких частотах вращения. Уравнение кинематического баланса
nшт= nэ.д.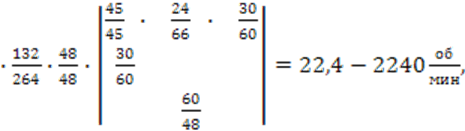
где nэ.д.= 250 – 3500 об/мин.
На рис.8.2 представлена диаграмма частот вращения и мощности электродвигателя постоянного тока.
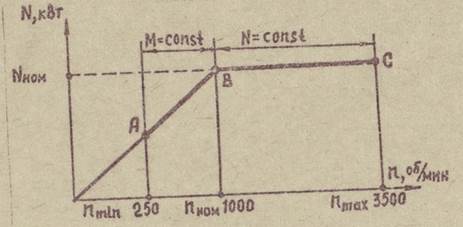
Рис. 8.2
Рабочий диапазон начинается с минимальной частоты вращения в точке А. Участок до точки В соответствует диапазону частот вращения с постоянным крутящим моментом и больше всего удовлетворяет требованиям предварительной обработки. В точке В двигатель имеет номинальную частоту и номинальную мощность. Дальнейшее регулирование оборотов увеличением тока якоря при неизменном возбуждении невозможно из-за увеличения реакции якоря, снижающей крутящий момент. Течка В диаграммы соответствует началу диапазона регулирования чисел оборотов с постоянной мощностью и осуществляется путем изменения тока возбуждения при неизменном напряжении на якоре.
8.2. Движение подачи
Для перемещения суппорта в продольном и поперечном направлениях в станке применен следящий привод (рис.8.3), предназначенный для точного воспроизведения входного управляющего сигнала и преобразования его в механическое перемещение.
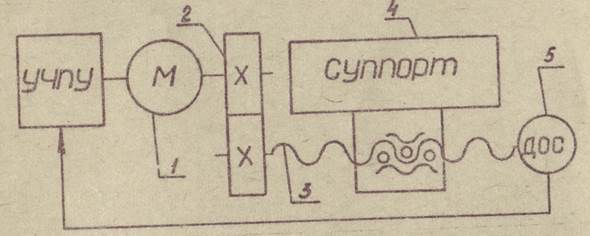
Рис. 8.3
Кулачки отклонения продольной подачи
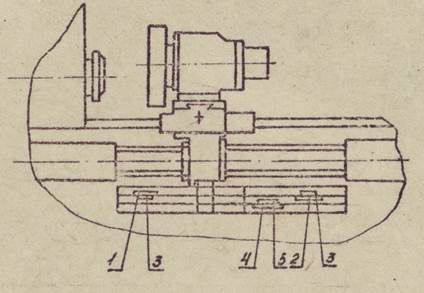
1 - кулачок для отключения продольной подачи при ходе каретки влево; 2 - кулачок для отключения продольной подачи при ходе каретки вправо; 3 - кулачки аварийного отключения; 4 - кулачки замедления скорости перемещения при выходе в "0" станка; 5 - кулачок выхода в зону "0" станка
Рис. 8.4
Кулачки отклонения поперечной подачи
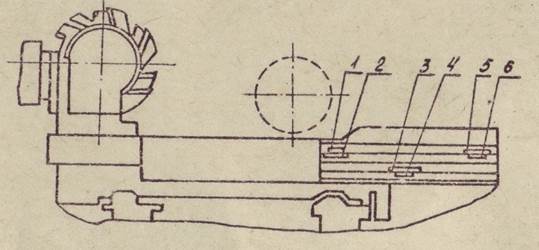
1 - кулачок аварийного останова прихода суппорта к оси шпинделя; 2 - кулачок для отключения подачи при ходе суппорта к оси шпинделя; 3 - кулачок замедления скорости перемещения при выходе в "0" станка; 4 - кулачок выхода в зону "0" станка; 5 - кулачок для отключения подачи при ходе суппорта от оси шпинделя; 6-кулачок аварийного останова при ходе суппорта от oси шпинделя
Рис. 8.5
Следящий привод представляет собой комплекс, состояний из высокомоментного электродвигателя постоянного тока 1, зубчатой передачи 2, передачи винт-гайка качения 3, преобразующей вращательное движение в поступательное перемещение суппорта 4 и системы обратной связи по скорости и но перемещению. Датчик обратной связи 5 представляет собой круговой резользер типа ВТМ-1Г, который через муфту связан с ходовым винтом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.