БУ Тролль.
Блок управления «Тролль» производится на заводе СПУ (Санкт-Петербург). При проектировании блока и выборе комплектующих учитывались многие, типичные для России, неисправности. Например, кнопки ручного управления и пускатели двигателей не имеют движущихся частей, что исключает их залипание и попадание влаги и грязи. Реализована и многоуровневая программная защита от различных аппаратных сбоев.
Простота и удобство обслуживания обеспечивается модульной конструкцией на разъемах, что делает возможным быструю замену отдельных блоков.
Блоки управления установленные в корпусе электролиза рядом с электролизерами. Размеры блока составляют 1600 х 600 х 400 мм. (высота/ширина/глубина). Внешний вид БУ приведен на рис.3.
В нижней части БУ находятся силовые модули управления двигателями привода анодной рамы, а так же клеммные колодки, к которым подключается оборудование электролизера и подводится питание БУ. На дверце нижней части расположены автоматы-распределители питания двигателей.
В верхней части БУ находится контроллер MicroPC фирмы Octagon Systems вместе с модулями оптической развязки фирмы Grayhill. Все входы и выходы БУ имеют гальваническую развязку. В верхней части находятся модули термостатизирования БУ, в том числе нагреватели и вентиляторы, обеспечивающие постоянную, положительную температуру внутри блока.
На дверце верхней части расположена панель индикации и управления блоком, состоящая из двух светодиодных дисплеев индикации параметров работы электролизеров, совмещенных с мембранными клавиатурами управления электролизерами. Посередине расположена мембранная клавиатура выбора режима индикации. Панель управления отдельным микроконтроллером позволяет:
а) отображать до 64 различных параметров работы электролизера
и БУ;
б) задавать уставочное значение параметров управления
электролизером;
в) осуществлять переключение между ручным, автоматическим и
специальным режимами управления;
г) управлять в ручном режиме двигателями анода и системой АПГ.
Следует отметить, что все сигналы ручного управления проходят через контроллер MicroPC. Надежность канала (клавиатура - контроллер MicroPC – модули опторазвязки – оборудование) не уступает применяемым обычно для этого релейным схемам, при этом контроллер «знает» о ручных воздействиях протоколирует их и учитывает при дальнейшем автоматическом управлении, исправляя грубые ошибки персонала.
Над панелью размещены лампы индикации трехфазного напряжения двигателей и аварийной сигнализации.
Стабилизация межполюсного расстояния.
Для нормальных условий процесса производства алюминия методом электролиза, необходимо поддерживать оптимальную температуру электролита, близкую к 950 0С. Для этого надо поддерживать определенную электрическую мощность, затрачиваемую на разогрев ванны. Эта мощность равна произведению (по закону Ома) тока серии и напряжения на ванне. Ток серии пытается стабилизировать КПП. Напряжение, для поддержания необходимой мощности, определяется опытным путем и выставляется на верхнем уровне в виде уставки напряжения МПР.
Сопротивление шин подвода электроэнергии к электролизеру, анода, катодного устройства, штырей и металла мало по сравнению с сопротивлением электролита и поэтому « основная» часть напряжения падает на нем. То есть, одним полюсом подвода электроэнергии принято считать поверхность металла, а другим, поверхность анода. Вот расстояние между этими полюсами и называется межполюсным и туда прикладывается почти вся электрическая мощность и там же выделяется тепло для разогрева ванны, хотя по размеру межполюсное расстояние и составляет всего несколько сантиметров.
Алгоритм микропроцессора нижнего уровня в своих вычислениях «предполагает», что удельное сопротивление электролита всегда постоянно. Это значит, что напряжение на ванне может зависеть только от тока серии и, собственно, межполюсного расстояния. Задачей микропроцессора является вычисление такой величины, которая зависит только от сопротивления ванны, а не от тока серии. Такая величина есть – это приведенное напряжение анода (Uпр.), которая вычисляется по формуле:
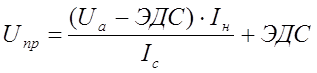
где
Микропроцессор не станет регулировать МПР при изменении тока, т.к.
Прогнозирование анодных эффектов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.