







1. Задание для выполнения РГЗ:
- Спроектировать систему подчиненного регулирования скорости тиристорного электропривода постоянного тока.
2. Параметры электрического двигателя:
· В соответствии с вариантом №20 выбираем двигатель постоянного тока серии 2П:
2ПБ112LГУХЛЧ с номинальными данными:
Номинальная мощность ![]()
Номинальное напряжение ![]()
Номинальная скорость
вращения ![]()
КПД в номинальном режиме
работы ![]()
Сопротивление якоря при
температуре ![]()
![]()
Сопротивление добавочных
полюсов ![]()
Сопротивление обмотки
возбуждения ![]()
Индуктивность обмотки якоря ![]()
Момент инерции ![]()
Требуемый диапазон
регулирования частоты вращения ![]()
Допустимая статическая ошибка
регулирования ![]()
Превышение температуры
обмоток при установившемся тепловом состоянии ДПТ типа 2ПБ и 2ПО – класс F
(рабочая температура до ![]() ).
).
Номинальный ток цепи якоря: 
· Необходимо привести активное сопротивление обмоток к рабочей температуре:
![]()
где ![]()
тогда
![]()
![]()
![]()
![]() ,
,
тогда сопротивление якорной цепи двигателя:
![]()
3. Рассчитываем силовой согласующий трансформатор для питания тиристорного преобразователя, собранного по трехфазной мостовой схеме выпрямления:
Трансформатор в управляемом вентильном электроприводе необходим для согласования напряжения сети с напряжением двигателя.
·
Фазное напряжение вторичной
обмотки трансформатора определяется выражением:  ,
,
где
![]() – коэффициент
запаса по напряжению сети
– коэффициент
запаса по напряжению сети
![]() – коэффициент
запаса по напряжению, учитывающей неполное открытие вентилей при максимальном
управляющем сигнале.
– коэффициент
запаса по напряжению, учитывающей неполное открытие вентилей при максимальном
управляющем сигнале.
![]() – коэффициент
запаса по напряжению, учитывающий падение напряжения в вентилях схемы и в
обмотках трансформатора.
– коэффициент
запаса по напряжению, учитывающий падение напряжения в вентилях схемы и в
обмотках трансформатора.
![]() – коэффициент,
устанавливающий зависимость между средневыпрямленным напряжением
преобразователя и напряжением вторичной обмотки трансформатора, для мостовой
схемы выпрямления.
– коэффициент,
устанавливающий зависимость между средневыпрямленным напряжением
преобразователя и напряжением вторичной обмотки трансформатора, для мостовой
схемы выпрямления.
![]() –номинальное
напряжение двигателя.
–номинальное
напряжение двигателя.
· Коэффициент трансформации трансформатора:
Примем ![]() ,пренебрегая погрешностью в 1.3%
,пренебрегая погрешностью в 1.3%
· Токи фаз вторичной и первичной обмоток определяются по соотношениям:
![]() ,
,
где значение коэффициентов для мостовой схемы выпрямления:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
· Типовая мощность трансформатора:
![]()
Принимаем
трансформатор с мощностью ![]()
· Приведенное ко вторичной обмотке активное сопротивление одной фазы трансформатора:
 ,
,
где
![]() – потери
активной мощности трансформатора в режиме короткого замыкания
– потери
активной мощности трансформатора в режиме короткого замыкания ![]() .
.
· Реактивное сопротивление одной фазы трансформатора, приведенное ко вторичной обмотке:
 ,
,
где
![]() – полное
сопротивление одной фазы трансформатора, приведенное ко вторичной обмотке;
– полное
сопротивление одной фазы трансформатора, приведенное ко вторичной обмотке;
![]() – напряжение
короткого замыкания трансформатора.
– напряжение
короткого замыкания трансформатора.
· Индуктивность
трансформатора, приведенная ко вторичной обмотке:  ,
,
где
![]() – частота
напряжения питающей сети
– частота
напряжения питающей сети ![]()
· Теперь можно определить эквивалентные параметры якорной цепи двигателя. В мостовой схеме выпрямления ток нагрузки протекает одновременно через две фазы трансформатора, поэтому:
![]()
![]()
· Максимальную средневыпрямленную ЭДС найдем как:

·
Посчитаем
ЭДС с учетом ограничения минимального угла регулирования ![]()
![]()
· Тогда коэффициент передачи тиристорного преобразователя
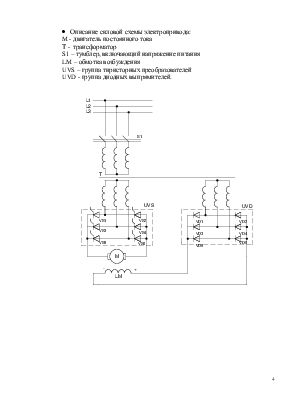
· Описание силовой схемы электропривода:
M - двигатель постоянного тока
Т - трансформатор
S1 – тумблер, включающий напряжение питания
LM – обмотка возбуждения
UVS – группа тиристорных преобразователей
UVD - группа диодных выпрямителей.
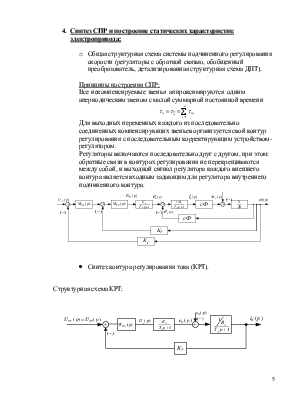
4. Синтез СПР и построение статических характеристик электропривода:
o Общая структурная схема системы подчиненного регулирования скорости (регуляторы с обратной связью, обобщенный преобразователь, детализированная структурная схема ДПТ).
Принципы построения СПР:
Все некомпенсируемые звенья аппроксимируются одним апериодическим звеном с малой суммарной постоянной времени
Для выходных переменных каждого из последовательно соединенных компенсирующих звеньев организуется свой контур регулирования с последовательным корректирующим устройством-регулятором.
Регуляторы включаются последовательно друг с другом, при этом: обратные связи в контурах регулирования не перекрещиваются между собой, и выходной сигнал регулятора каждого внешнего контура является входным задающим для регулятора внутреннего подчиненного контура.
· Синтез контура регулирования тока (КРТ).
Структурная схема КРТ:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.