4.2.2 Механизмы металлорежущих станков и их кинематические схемы
Любой металлорежущий станок имеет два основных механизма: механизм главного движения резания и механизм движения подачи.
 |
|
1 |
2 |
|||
|
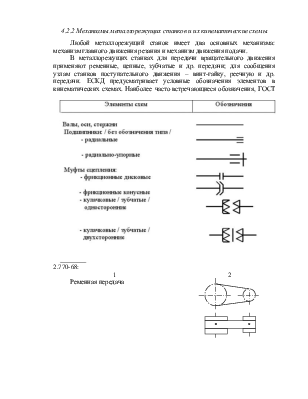
Ременная передача |
|
|||
|
Зубчатые передачи: цилиндрические |
|
|||
|
конические |
|
|||
|
червячные |
|
|||
|
Реечная зубчатая передача |
|
|||
|
Винт, передающий движение: |
|
|||
|
винт и неразъемная гайка |
|
|||
|
винт и разъемная гайка |
|
|||
|
Электродвигатель |
|
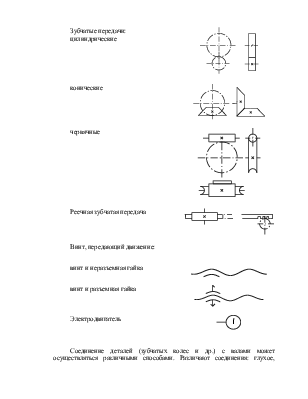
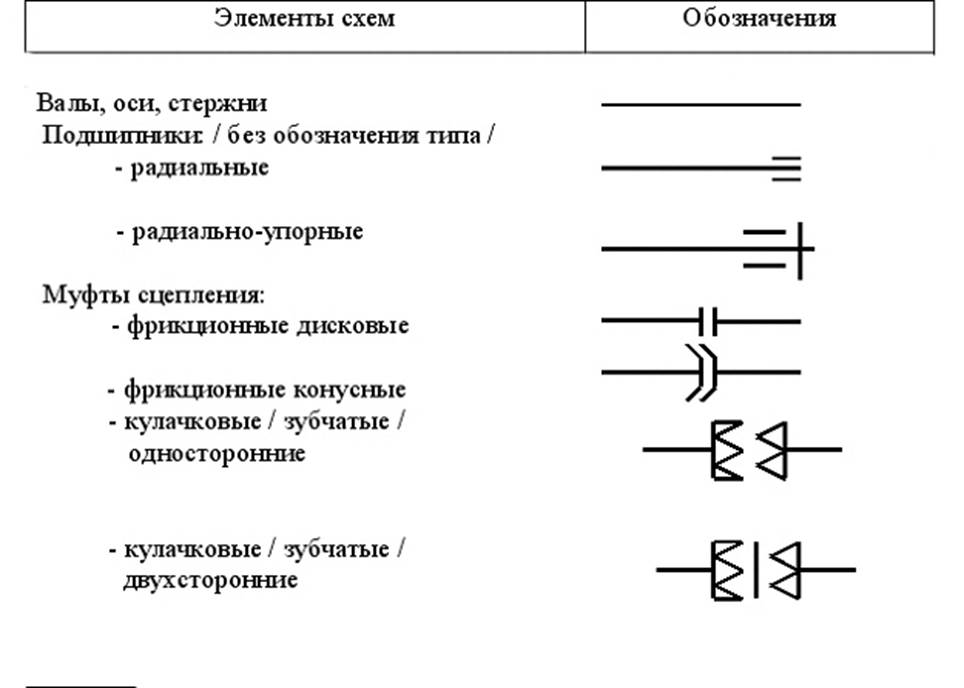
Соединение деталей (зубчатых колес и др.) с валами может осуществляться различными способами. Различают соединения: глухое, свободное при вращении, подвижное без вращения и при помощи вытяжной шпонки.
Глухое соединение. Зубчатое колесо жестко связано с валом, вращается только вместе с ним и не может перемещаться вдоль вала.
|
|
|
||||||
|
а |
б |
Рис. 50. Глухое соединение (а) свободное при вращении (б)
Свободное при вращении. Зубчатое колесо и вал могут вращаться независимо друг от друга, но зубчатое колесо не может перемещаться вдоль вала.
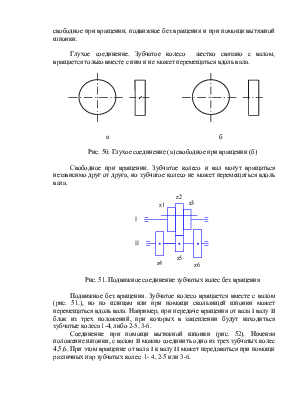
Рис. 51. Подвижное соединение зубчатых колес без вращения
Подвижное без вращения.Зубчатое колесо вращается вместе с валом (рис. 51.), но по шлицам или при помощи скользящей шпонки может перемещаться вдоль вала. Например, при передаче вращения от вала I валу II блок из трех положений, при которых в зацеплении будут находиться зубчатые колеса 1-4, либо 2-5, 3-6.
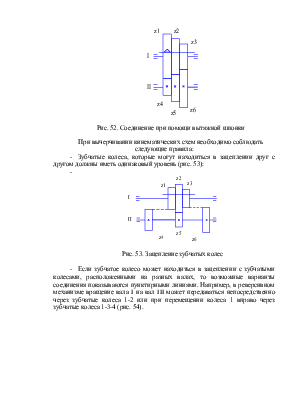
Соединение при помощи вытяжной шпонки (рис. 52). Изменяя положение шпонки, с валом II можно соединить одно из трех зубчатых колес 4,5,6. При этом вращение от вала I к валу II может передаваться при помощи различных пар зубчатых колес: 1- 4, 2-5 или 3-6.
Рис. 52. Соединение при помощи вытяжной шпонки
При вычерчивании кинематических схем необходимо соблюдать следующие правила:
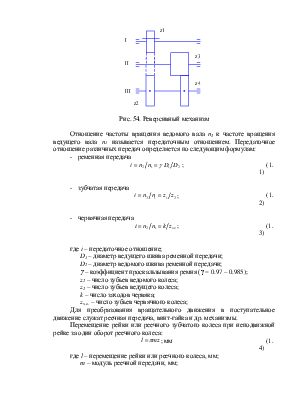
- Зубчатые колеса, которые могут находиться в зацеплении друг с другом должны иметь одинаковый уровень (рис. 53):
-
Рис. 53. Зацепление зубчатых колес
- Если зубчатое колесо может находиться в зацеплении с зубчатыми колесами, расположенными на разных валах, то возможные варианты соединения показываются пунктирными линиями. Например, в реверсивном механизме вращение вала I на вал III может передаваться непосредственно через зубчатые колеса 1-2 или при перемещении колеса 1 вправо через зубчатые колеса 1-3-4 (рис. 54).
Рис. 54. Реверсивный механизм
Отношение частоты вращения ведомого вала n2 к частоте вращения ведущего вала n1 называется передаточным отношением. Передаточное отношение различных передач определяется по следующим формулам:
- ременная передача
|
|
(1.1) |
- зубчатая передача
|
|
(1.2) |
- червячная передача
|
|
(1.3) |
где i – передаточное отношение;
D1 – диаметр ведущего шкива ременной передачи;
D2 – диаметр ведомого шкива ременной передачи;
g – коэффициент проскальзывания ремня (g = 0.97 – 0.985);
z2 – число зубьев ведомого колеса;
z2 – число зубьев ведущего колеса;
k – число заходов червяка;
zч.к. – число зубьев червячного колеса;
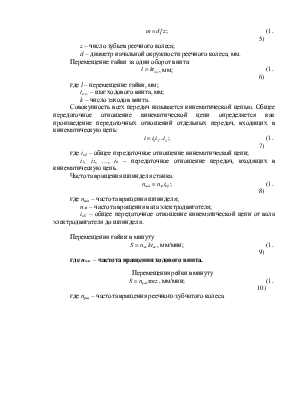
Для преобразования вращательного движения в поступательное движение служат реечная передача, винт-гайка и др. механизмы.
Перемещение рейки или реечного зубчатого колеса при неподвижной рейке за один оборот реечного колеса:
|
|
(1.4) |
где l – перемещение рейки или реечного колеса, мм;
m – модуль реечной передачи, мм;
|
|
(1.5) |
z – число зубьев реечного колеса;
d – диаметр начальной окружности реечного колеса, мм.
Перемещение гайки за один оборот винта:
|
|
(1.6) |
где l – перемещение гайки, мм;
tк.в. – шаг ходового винта, мм;
k – число заходов винта.
Совокупность всех передач называется кинематической цепью. Общее передаточное отношение кинематической цепи определяется как произведение передаточных отношений отдельных передач, входящих в кинематическую цепь:
|
|
(1.7) |
где iоб – общее передаточное отношение кинематической цепи;
i1, i2, …, in – передаточное отношение передач, входящих в кинематическую цепь.
Частота вращения шпинделя станка.
|
|
(1.8) |
где nшп – частота вращения шпинделя;
nэд – частота вращения вала электродвигателя;
iоб – общее передаточное отношение кинематической цепи от вала электродвигателя до шпинделя.
|
|
(1.9) |
|
|
(1.10) |
где nрш– частота вращения реечного зубчатого колеса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.