












Министерство образования и науки Российской федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт, техники, технологии и управления
РАСЧЕТ СИСТЕМЫ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ ЭЛЕКТРОПРИВОДА В РЕЖИМЕ МАЛЫХ ПЕРЕМЕЩЕНИЙ
Методические указания к выполнению практической работы
по дисциплине «Электромеханические системы» для студентов
специальности 220201 «Управление и информатика в технических
системах» всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2010
|
Управление положением находит широкое применение в станках с ЧПУ, в системах наведения антенн, телескопов, в системах управления промышленными роботами и в большинстве случаев строится по принципу подчиненного регулирования. Системы управления положением принято разделять на работающие в режиме позиционирования и слежения. Позиционированием называется такой режим работы, при котором задачей управления является перемещение электроприводом механизма (рабочего органа) из одного положения в другое при требуемом быстродействии.
В режиме позиционирования различают:
- режим малых перемещений, при котором ни один из регуляторов не ограничен и система работает как линейная;
- режим средних перемещений, при котором ограничен якорный ток, т.е. ограничен выходной сигнал регулятора скорости;
- режим больших перемещений, при обработке которых двигатель в течение некоторого времени работает на установившейся скорости, т.е. все регуляторы некоторое время находятся в зоне ограничения.
Цель работы - аналитический расчет параметров следящей трехконтурной системы в режиме малых перемещений с установлением связей между параметрами регуляторов и основными показателями качества переходных процессов.
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
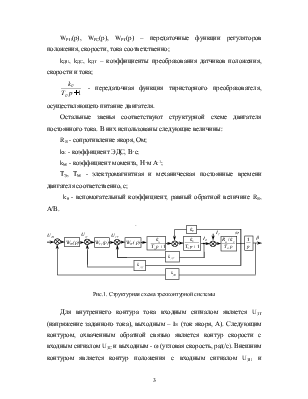
На рис.1 изображена структурная схема трехконтурной системы, построенной по принципу подчиненного регулирования [1,2]. На рисунке приняты следующие обозначения:
WРП(р), WРС(р), WРТ(р) – передаточные функции регуляторов положения, скорости, тока соответственно;
kДП, kДС, kДТ – коэффициенты преобразования датчиков положения, скорости и тока;
 -
передаточная функция тиристорного преобразователя, осуществляющего питание двигателя.
-
передаточная функция тиристорного преобразователя, осуществляющего питание двигателя.
Остальные звенья соответствуют структурной схеме двигателя постоянного тока. В них использованы следующие величины:
RЯ - сопротивление якоря, Ом;
kЕ - коэффициент ЭДС, В·с;
kМ - коэффициент момента, Н·м А-1;
ТЭ, ТМ - электромагнитная и механическая постоянные времени двигателя соответственно, с;
k0 - вспомогательный коэффициент, равный обратной величине RЯ, А/В.
Рис.1. Структурная схема трехконтурной системы
Для внутреннего контура тока входным сигналом является UЗТ (напряжение заданного тока), выходным – IЯ (ток якоря, А). Следующим контуром, охваченным обратной связью является контур скорости с входным сигналом UЗС и выходным - ω (угловая скорость, рад/с). Внешним контуром является контур положения с входным сигналом UЗП и выходным β (угол поворота, рад). В каждом контуре присутствует регулятор, с помощью которого компенсируется большая постоянная времени (своя для каждого контура). Предполагается, что в данной работе рассматривается система управления позиционированием электропривода, работающая в режиме малых перемещений.
В данном режиме ни один из регуляторов не входит в насыщение и поэтому система линейна. Оптимизация системы управления положением начинается с внутреннего контура тока. Он настраивается на технический оптимум с малой некомпенсируемой постоянной времени Тμ, определяемой инерционностью тиристорного преобразователя:
|
ТμТ=Тμ=ТП. |
(1) |
Компенсируется при этом электромагнитная постоянная двигателя ТЭ.
Желаемая передаточная функция контура тока, настроенного на технический оптимум (ТО), имеет вид [1]:
|
|
(2) |
Используя параметры структурной схемы (рис.1), с отключенной обратной связью по ЭДС, передаточная функция разомкнутого внутреннего контура тока имеет вид:
|
|
(3) |
Приравнивая выражения (2) и (3), получим выражение для расчета передаточной функции регулятора тока:
|
|
(4) |
Получаем, что регулятор тока состоит из параллельного соединения усилительного и интегрирующего звена, т.е. является пропорционально-интегральным (ПИ-регулятором).
Передаточная функция замкнутого контура тока с учетом (1) после упрощения имеет вид:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 .
. .
. .
.