

Лекция №4.
Дифференциальная чувствительность при последовательном соединении:
При параллельном соединении:
Дифференциальная чувствительность при последовательно-параллельном соединении:
В последней формуле знак «-» означает что чувствительность возрастает, знак «+» что чувствительность уменьшается.
Принципы регулирования САУ.
Управляющее устройство, вырабатывающее сигналы управления по указанному принципу называется регулятором. При использовании принципа обратной связи выходные переменные объекта можно разделить на регулируемые и измеряемые.
Регулируемыми переменными называются те физические переменные объекта, которые непосредственно характеризуют процесс регулирования.
При разработке САУ на эти переменные накладываются требования по точности и быстродействию.
Измеряемыми переменными называются сигналы, в основном датчиков, которые подаются в регулятор, как правило, в виде электрических величин.
Среди измеряемых переменных можно выделить главные и вспомогательные, еще они называются корректирующие, измеряемые переменные.
Главные измеряемые переменные пропорциональны регулируемым величинам. Они образуют главные обратные связи, с помощью которых системы выполняет свое функциональное назначение.
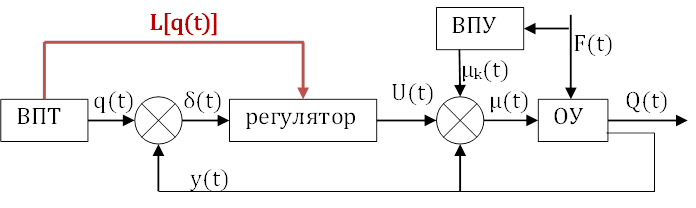 |
q(t) – задающее воздействие, которое определяет желаемое поведение регулируемых переменных системы. Если, q(t)=const то системы выполняет функцию стабилизации. Если, q(t) не равно const, то система выполняет функцию слежения за командным сигналом, и называется следящей системой.
При построении автоматических систем используют комбинированное управление. При этом наиболее часто комбинируют программное и стабилизирующее управление.
ВПТ – вычислитель программной траектории.
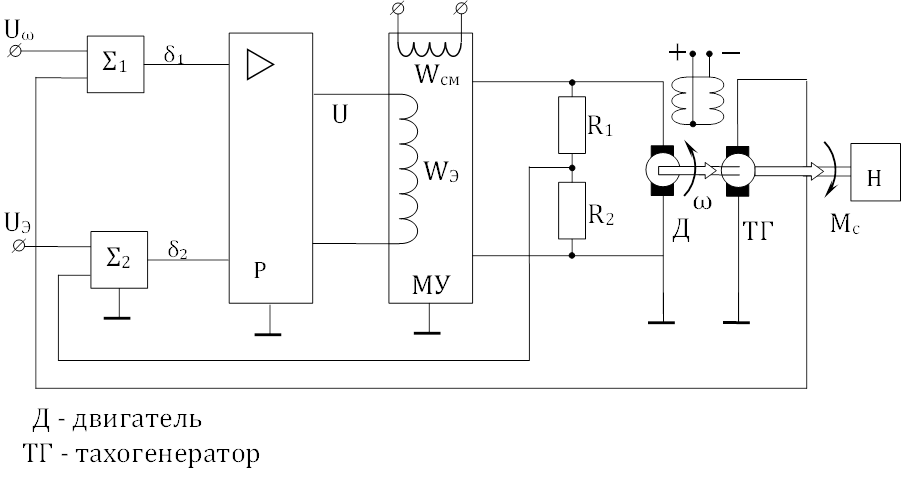 |
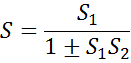
Рис. «Система стабилизации скорости вращения двигателя постоянного тока».
Система
состоит из двигателя (Д), работающего на изменяющуюся нагрузку (Н); усилителя
мощности, в качестве которого используется нереверсивный, поляризованный
магнитный усилитель (МУ) и регулятора (Р). На вход регулятора поступает сигнал ![]() пропорциональный скорости вращения
пропорциональный скорости вращения ![]() и
действительной скорости вращения нагрузки, которая измеряется тахогенератором
(ТГ). Кроме того, на генератор так же подается сигнал
и
действительной скорости вращения нагрузки, которая измеряется тахогенератором
(ТГ). Кроме того, на генератор так же подается сигнал ![]() , пропорциональный отклонению напряжения на
двигателе, подается с делителя R1R2, от требуемого
напряжения.
, пропорциональный отклонению напряжения на
двигателе, подается с делителя R1R2, от требуемого
напряжения.
Система
работает следующим образом: при нормальной нагрузке, с выхода магнитного
усилителя снимается напряжение, под действием которого двигатель вращается с
заданной программной скоростью. При этом напряжение с тахогенератора и напряжение
с делителя равны по величине и противоположны по знаку, соответствующим
напряжениям задатчиков (![]() ) и с выхода сумматоров сигналы становятся равными
нулю, то есть на обмотку управления магнитного усилителя напряжение не
подается. При изменении нагрузки изменяется скорость двигателя, что приводит к
появлению напряжения на входе регулятора и напряжение магнитного усилителя
также изменяется, причем это изменение таково, что скорость двигателя
становится близкой к заданной. В рассмотренной схеме регулируемой переменной
является скорость двигателя, а главной измеряемой переменной – напряжение с
тахогенератора. Напряжение с делителя R1R2 образует
вспомогательную корректирующую обратную связь, с помощью которой улучшаются
динамические свойства системы. В этой схеме реализуется комбинация принципов
программного управления и стабилизации. Причем программное управление
формируется с помощью напряжения смещения, а стабилизирующее управление
вырабатывается регулятором, который работает по принципу отрицательной обратной
связи.
) и с выхода сумматоров сигналы становятся равными
нулю, то есть на обмотку управления магнитного усилителя напряжение не
подается. При изменении нагрузки изменяется скорость двигателя, что приводит к
появлению напряжения на входе регулятора и напряжение магнитного усилителя
также изменяется, причем это изменение таково, что скорость двигателя
становится близкой к заданной. В рассмотренной схеме регулируемой переменной
является скорость двигателя, а главной измеряемой переменной – напряжение с
тахогенератора. Напряжение с делителя R1R2 образует
вспомогательную корректирующую обратную связь, с помощью которой улучшаются
динамические свойства системы. В этой схеме реализуется комбинация принципов
программного управления и стабилизации. Причем программное управление
формируется с помощью напряжения смещения, а стабилизирующее управление
вырабатывается регулятором, который работает по принципу отрицательной обратной
связи.
Измерительные и исполнительные устройства.
Измерительное устройство служит для получения информации о состоянии объекта и по обратной связи эта информация в виде сигналов подается в регулятор, вместе с полезной информацией в регулятор также поступают помехи. В общем случае комплекс измерительных средств системы сам по себе является динамической системой и описывается дифференциальными уравнениями.
Входами
в такой системе являются переменные состояния объекта и помехи, а выходами
измеряемые переменные. В тех случаях, когда динамикой измерительных устройств
пренебрегать нельзя, дифференциальные уравнения измерителей относят к
уравнениям объекта, а для описания выходных переменных измерителей используют
алгебраические уравнения: ![]() σ(t) – измеряемая
величина, v(t) – помеха.
σ(t) – измеряемая
величина, v(t) – помеха.
Чаще всего в системах с обратной связью на вход регулятора подаются сигналы, отражающие разность между заданным и истинным состоянием объекта.
Если
в системе происходит измерение нескольких параметров: ![]() , причем каждое уравнение будет описывать отдельный
параметр. Для того чтобы описать все контролируемые параметры используется
понятие матрицы.
, причем каждое уравнение будет описывать отдельный
параметр. Для того чтобы описать все контролируемые параметры используется
понятие матрицы. ![]() , где С[i]- матрица
контролируемых параметров, x(t) – помехи,
, где С[i]- матрица
контролируемых параметров, x(t) – помехи, ![]() - все контролируемые параметры.
- все контролируемые параметры.
При проектировании систем измерительное устройство выбирают так, чтобы диапазон измерения приходился на линейный участок статической характеристики, а возможные нелинейные эффекты были незначительны. Исполнительные устройства служат для передачи и преобразования управляющего воздействия на объект управления. Они бывают разного рода. И исполнительные устройства и устройства измерения относятся к неизменяемой части системы, поэтому при составлении модели системы их собственную динамику относят к объекту управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.