|
|
|
Рис.33. |
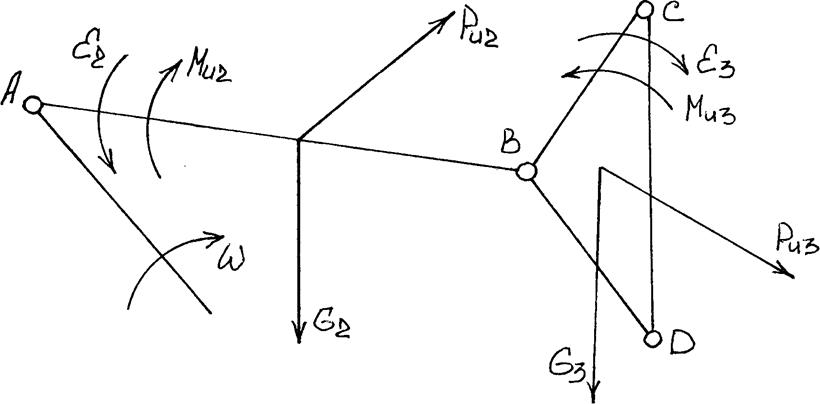
Расчёт внешних сил действующих на звенья четырёхзвенника.
Силовой расчет механизмов заключается в определении тех сил, которые действуют на отдельные звенья механизмов приихдвижении (Рис.34.).
В расчетных заданиях вычерчивается в масштабе одноиз положений механизма, а также в масштабе изображаютсхемумеханизма.
Внешние силы, действующие на звенья механизма, делят на 3 группы.
Схема сил действующих на механизм:
|
|
|
Рис.34. |
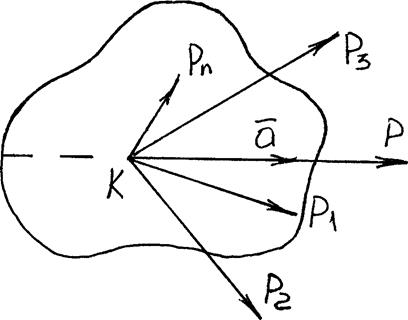
Силы инерции (Рис.35.):
|
|
|
Рис.35. |
Если к материальной (.) К приложено произвольное число внешних силPn, то под их действием точка получает такое же ускорение, как если б на неё действовала лишь одна сила Р , равная геометрической сумме приложенных сил.
а=P/m=P1 +P2 +P3 +P4 +…+Pn /m
m- масса рассматриваемой точки.
а- ускорение.
![]() Предположив,что кроме заданных сил, на эту точку действует еще
одна фиктивная сила Р/ , равная по величине силе Р, но направленная
в прямо противоположную сторону
Предположив,что кроме заданных сил, на эту точку действует еще
одна фиктивная сила Р/ , равная по величине силе Р, но направленная
в прямо противоположную сторону
![]()
![]() Р/= - P ; или Pn-P=0
Р/= - P ; или Pn-P=0
Р/+P1+P2+P3+……+Pn=0
![]() Фиктивная сила Р/, уравновешивающая приложенную к точке
заданную систему сил, называется силой инерции.Pин= - m*aS
Фиктивная сила Р/, уравновешивающая приложенную к точке
заданную систему сил, называется силой инерции.Pин= - m*aS
![]() Силы инерции направлены
противоположно вектору ускорений центра масс каждого звена
Силы инерции направлены
противоположно вектору ускорений центра масс каждого звена
![]() .PB2 = - m*aS2
.PB2 = - m*aS2
.PB3 = - m*aS3
Момент сил инерции: МИ=-JS*ε
МИ – момент сил инерции
JS – момент инерции звена относительно оси проходящей через центр масс
ε – угловое ускорение звена.
Для всех линейных звеньев:
Js=0.1m*l2, кг/м ; JS2=0.1m2*lBA2 ; ε=aT/R ; aT=εR ; ε2= aBАТ/lBA ; c-2(см.план ускорений)
Направление углового ускорения определяем по направлению соответствующей тангенциальной составляющей .
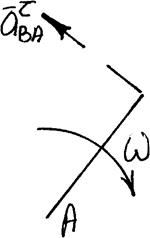
Направление МИ определяется следующим образом. Мысленно прикладываем к звену касательное ускорение (аτ). Вращательный вектор вокруг полюса относительного вращения даёт нам направление против которого будет действоватьМИ(Рис.36.).
|
|
|
|
Рис.36. |
|
G=m*g (g=10 m/c2)
погонная масса звена q=(10÷20)кг/м
тогда: m2=q*lAB ; m3=q(lBC+lCD+lBD)
Необходимо мысленно приложитьв (.)В звена АВ и определить направление вращения этого звена относительно (.)А под действием приложенной составляющей. Это направление соответствует угловому ускорению.
Для звена: МИ3=-JS3*ε 3
Для треугольных звеньев момент инерции определяется по формуле:JS=1/36*Σ m*Σ l
ε= aBCТ/lBC ; c-2 cмотри тангенц. ускор, 3 звена по плану ускор.
Для поступательного движения: МИ3= 0 .Четвертая сила — сила полезного сопротивления технологическая сила) для преодоления которой создан механизм .
Принять силу полезного сопротивления равной 4РИ max т.е.
PПС= 4РИ max ; PИ2 ≤ PИ3
Силу полезного сопротивления прикладывем к свободной точке механизма т.е. кинематически не связанной с другими звеньями и направляют в сторону противоположную направлению вектора полной скорости этой точки.
Кинематическое исследование механизма.
Определение реакции кинематических пар.
(Метод разделения механизма на отдельные структурные группы - или группы Ассура).
W=0 - степень подвижности структурной группы.
n=2,4,6…- подвижность.
Для рассматриваемого шарнирного 4х-звенника существует только одна структурная группа, группа звеньев 2-5, которая получается путем отбрасывания ведущего звена.
n=2 W=3n-2P5 – P4 =6-2*3=0
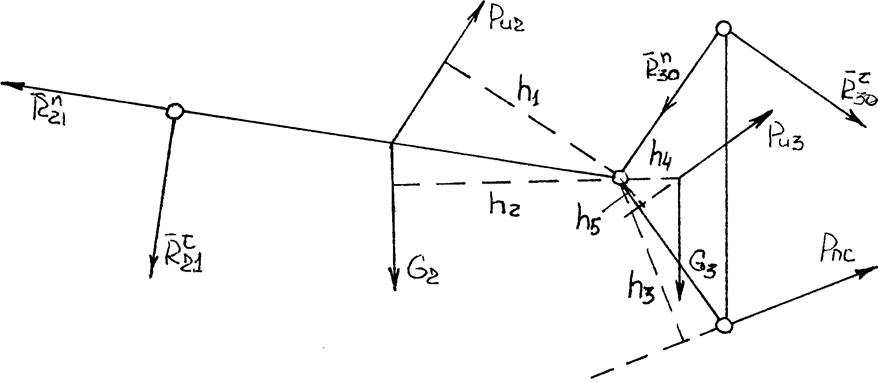
В курсовой работе следующая схема - этосхема структурной группы в масштабе μS. Изображенная структурная группа должна быть загружена действующими внешними силами в реакциями отброшенных связей (Рис.37.).
|
|
|||
|
Рис.37. |
![]() Под действием указанных системы сил группа будет находиться в равновесии
и для нее будет справедливо 3 уравнения кинематики. В шарнире А прикладываем
реакцию со стороны отброшенного звена (R21), а в шарнире С- реакцию (R30) поскольку обе реакции n и t
известны по величине и по направлению, тоих раскладывают на две
составляющие нормальную и тангенциальную. R21=R21n+R21τ
Под действием указанных системы сил группа будет находиться в равновесии
и для нее будет справедливо 3 уравнения кинематики. В шарнире А прикладываем
реакцию со стороны отброшенного звена (R21), а в шарнире С- реакцию (R30) поскольку обе реакции n и t
известны по величине и по направлению, тоих раскладывают на две
составляющие нормальную и тангенциальную. R21=R21n+R21τ
![]()
![]()
![]()
![]()
![]() R30=R30n+R30τ
R30=R30n+R30τ
Нормальную составляющую желательно направлять вдоль звена. Поскольку группа2-3 находится в равновесии, то и в равновесии будут находиться и каждая из её звеньев. Следовательно, можно составить уравнения равновесия для каждогоиз звеньев групы.
В нашем случае уравнения моментов относительно (.) B будут иметь вид:
![]()
![]()
![]()
![]() ∑MZ(B)= R21τ * AB – PИ2 * h1 – MИ2 + G2 * h2=0 ;
∑MZ(B)= R21τ * AB – PИ2 * h1 – MИ2 + G2 * h2=0 ;
R21τ= (PИ2 * h1 + MИ2 - G2 * h2)/AB ; H
Значения:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.