Задачей кинематического анализа механизма является определение положений звеньев в пределах одного периода движения; построения траекторий для характерныхих точек; определение линейных скоростей и ускорений этих точек, а также угловых скоростей и ускорений звеньев.
В задачи кинематического исследования механизмов входят:
1. Определение положений звеньев, включая определение траекторий отдельных точек звеньев (решается построением планов положения звеньев)
2. Определением скоростей и ускорений (линейных и угловых) звеньев и отдельных точек.
При решении этих задач (1 и 2) должны быть известны : законы движения ведущего звена (кривошипа) и кинематическая схема механизма с указанием размеров звеньев. Как правило, кривошипы совершают равномерное вращательное движение (вращение ω=const, ε=0).
1. Схема : Вычисляем масштаб построения планов положений звеньев механизма.
|
|
Дано: X cm; Y cm; lOA m; lAB m; lBC m; lBD m; lCD m; ω=P/C= c-! ; n=об/мин. n=πn/30 c-1. |
План строится методом засечек , для вычисления масштаба μs необходимо задать чертежное изображение длины кривошипа.
loa= (50-80)mm ; loa=0,1mm; loaЧ=50 мм черт. изобр. μS=lOA/lOAЧ=0,1/50=0,002 м/мм ч.и.
lAB Ч=lAB/μS мм и т.д. с точностью до мм, так же и с XЧ и YЧ.
При построении планов положений шарнирного четырехзвенника необходимо найти крайнее положение звеньев, т.е. положения при которых кривошип и шатун располагаются вдоль одной оси.
Мертвое положение нельзя найти у двух кривошипного механизма.
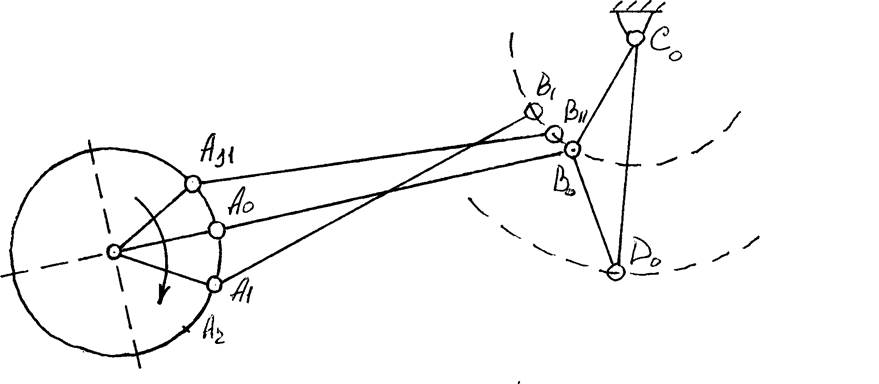
План положения звеньев механизма
Строится в масштабе μS c пересчитанными длинами звеньев (Рис.27.).
|
|
|
Рис.27. |
Начиная от найденного крайнего положения траекторию движения (А0) кривошипа необходимо поделить на 12 равных частей по направлению движения и зафиксировать 12 положений кривошипа и обозначить А1 А2 А3 А 4 далее пользуясь методом засечек найти все остальные.
Дальнейшее кинематическое исследование только для двух положений. Эти два положения выделяют жирными линиями. Примем положение центров тяжести S1 по середине линейных звеньев , для Δ звеньев центр масс принимают на пересечении, медиан. Центр масс кривошипа не отличают, поскольку весом этого звена пренебрегают.
Построение планов скоростей механизма.
Линейные скорости всех характерных точек механизмов определяются методом построения планов скоростей. Для этого предварительно составляются векторные уравнения выражающие собой полную скорость соответствующей точки звена из условия рассмотрения движения этой точки отдельно с каждым из звеньев. Графическое решение этих уравнений позволяет получить соответствующие планы скоростей.
VA m/c; VB m/c; VBA m/c; и т.д. VS2 и VS3 – скорости центров масс звеньев.
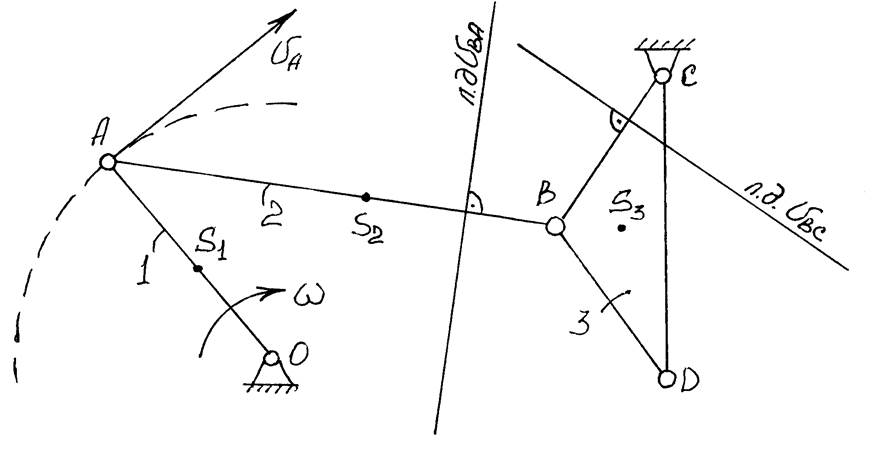
Построение планов скоростей механизма и их свойства.
|
|
|
Рис.28. |
Вычисление масштаба плана скоростей, Звено ОА - участвует в равномерно-вращательном движении.VA=ω*lOA, m/c. Зададимся чертежным изображением вектора скорости точки А (Рис.28.).
VAЧ=(50÷70)мм(рекомендуемые расстояния)
VA=2,5 м μV=VA/VAЧ=2,5/50=0,05 м/с мм ч.и.
Для построения плана скоростей и звеньев механизма, необходимо составить векторное уравнение, графическое изображение которых позволяют найти скорости и векторы. Точка В принадлежит к двум звеньям 2 и 3. Для составления интересующих векторных уравнений необходимо рассмотреть движение точки В отдельно с каждым звеном.
1. Векторное уравнение
Шатун АВ кинематически не связан со стойками. Он участвует в плоскопараллельном движении, состоящим из двух движений: поступательного с точкой А и поворотного относительно точки А. Тогда по теореме о сложении скоростей скорость абсолютная: VBч=VAч+VBAч, где VBAч – скорость поворотной части движения.
Движение точки B относительно точки А (относительная скорость). Из условия рассмотрения движения точки В со звеном 3 можно записать выражение: VBЧ=VCЧ+VBCЧ т.е. полная скорость точки В может быть представлена как векторная сумма скоростей составляющих движение. VAB - скорость поворот. части движения. точки В относительно А. VA- поступ. скорость точки А. Линия действия всегда направлена по нормали к звену AB. Эти два уравнения позволяют составить план скоростей.
Начинаем построение с выбора полюса П.
![]() 1) Проводим линию действия вектораVA (рис.30.)
1) Проводим линию действия вектораVA (рис.30.)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.