Так как условие выполняется, то на конвейере 2ЛТ100У окончательно устанавливаем ленту 2Ш*1000*2 *ТК – 200*4,5 – 3,5*Г-1-РБ; ГОСТ20 – 85.
2.3.4. Опредение установленной мощности привода
Nу с=  кВт
кВт
![]()
![]() т.е. Nдв
сум = 180кВт > Nус
= 143,33кВт
т.е. Nдв
сум = 180кВт > Nус
= 143,33кВт![]()
где ![]() = 0,85 - КПД редуктора;
= 0,85 - КПД редуктора;
![]()
![]() k = k1× k2× k3 =1,5×1×1,1=1,65 ,принимаем k=1,5
k = k1× k2× k3 =1,5×1×1,1=1,65 ,принимаем k=1,5
где k ![]() 1,5 – коэффициент запаса
установленной мощности привода:
1,5 – коэффициент запаса
установленной мощности привода:
k1 = 1,5– для углов наклона конвейера от –16° до -3°;
k2 = 1,0 – для конвейеров с суммарной мощностью привода более 120кВт;
k3 = 1,1 – для приводов с числом двигателей более одного;
Конвейер по мощности эксплуатировать можно.
Конвейер 2ЛТ100У проходит по всем параметрам.
2.3.5. Определение усилия натяжного барабана
Так как натяжное устройство конвейера 2ЛТ100У расположено в середине, то усилие натяжного барабана вычисляется по формуле :
![]() Н
Н
2.3.6. Диаграмма натяжения ленты конвейера 2ЛТ100У
 |
 |
2.4. Разработка конструкции привода
Расчет редуктора ленточного конвейера 2ЛT100У выполнен по методике представленной в литературе [5].
2.4.1. Исходные данные
1. Привод ленточного конвейера 2ЛT100У (см. рис.1.) односторонний и мощностью 90 кВт.
|
электродвигатель |
Ном. мощность, кВт. |
Частота вращения, об/мин |
Скольжение, % |
к.п.д. , % |
соsφ |
Мmax/Мном |
Масса, кг |
|
ВР250M4 |
90 |
1500 |
1 |
92 |
0,9 |
2,5 |
750 |
Общий вид электродвигателя
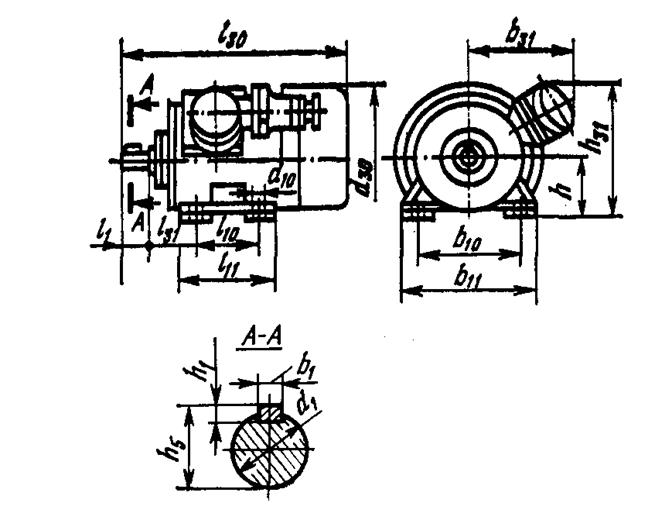
Габаритные присоединительные размеры ,мм:
|
l11 |
l30 |
l31 |
b1 |
d1 |
h1 |
h5 |
d10 |
h31 |
h |
b10 |
b11 |
|
540 |
1090 |
168 |
20 |
75 |
12 |
85 |
24 |
635 |
250 |
406 |
525 |
|
d30 |
l1 |
b31 |
|
620 |
140 |
500 |
2. Окружная сила на
барабане ленточного конвейера Ft=F0=
3. Скорость движения ленты – V=2,5 м/с.
4. Диаметр барабана Dб=630
Рис. 2.4. Схема привода.
Из схемы видно, что редуктор является трехступенчатый , но поскольку третья ступень не изменяет передаточного отношения ,то будем условно считать ,что редуктор двухступенчатый и будем производить кинематический расчёт для двухступенчатого редуктора.
2.4.2. Кинематический расчёт
Асинхронная частота вращения вала электродвигателя:

Определение передаточных чисел привода:
Определяем частоту вращения выходного вала редуктора:
![]()

Передаточное отношение редуктора:
Передаточное отношение быстроходной ступени:
![]()
Передаточное отношение тихоходной ступени:
2.4.3. Мощность на всех валах привода
Рдв = 90 кВт;
Р1 = Рдв∙ηтм∙ηоп , кВт
Р2 = Р1∙ηзц∙ηоп, кВт
Р3 = Р4 =Р2∙ηзц∙ηоп, кВт
где ηсм = 0,98 – КПД турбомуфты;
ηзц = 0,97 – КПД зубчатой цилиндрической передачи;
ηоп = 0,99 – КПД опор.
Р1 = 90∙0,98∙0,99 = 87,318 (кВт);
Р2 =87,318∙0,97∙0,99 = 83,85(кВт);
Р3 =83,85 ∙0,97∙0,99 = 80,52(кВт);
Необходимо, чтобы выполнялось условие: Р3 > Рвых,, где Рвых – мощность на тяговом барабане.
 кВт.
кВт.
Условие выполняется (80,52 > 40,612).
2.4.4. Частота вращения на всех валах привода
nдв = 1485 об/мин
n1 = nдв∙(1-Sтм), об/мин
n2 = n1 /UБ, об/мин
n3 = n2/UТ, об/мин
n1 = 1485∙(1-0,03)=1440,45 (об/мин);
n2 = 1440,45/4, 951 =290,94 (об/мин);
n3 = 290,94 /3,835 = 75,8 (об/мин).
2.4.5. Угловая скорость на всех валах привода:
ω =  , с-1
, с-1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.