У ВК величина Хв, що вимірюється, перетворюється в електричний сигнал Y, під дією якого у ВМ вироблюється механічна величина α - кут повороту рухомої частини приладу. Хш.
Досить узагальнено можна також подати і безпосередньо конструкцію аналогових електромеханічних приладів, приблизний варіант якої зображено на рис. 10.7.
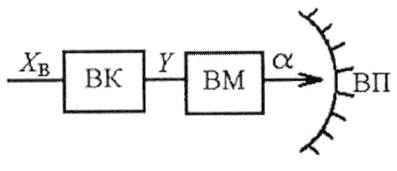
Рис. 10.6
Тут 1 - вимірювальний механізм; 2 - піввісь; 3 - спіральна пружина; 4 - стрілка; 5 - балансувальні вантажики; 6 - шкала; 7 - повітряний заспокоювач (демпфер, який призначається для зменшення часу коливань рухомої частини); 8 - коректор (для встановлення стрілки на нуль шкали); 9 - корпус.
Вхідним сигналом Y вимірювального механізму є струм IВМ, який може бути безпосередньо струмом, що вимірюється, або пропорційним вимірюваній величині Хв, наприклад, напрузі: ІBM=U/RBM, де RBM - внутрішній опір електричного кола вимірювального механізму. Електрична енергія струму IВМ перетворюється в механічну енергію за допомогою обертального моменту Моб, що виробляється у вимірювальному механізмі.
Під дією Моб разом з рухомою частиною вимірювального механізму повертається і стрілка, установлюючись при рівновазі Моб=Мпр. Протидіючий момент Мпр у випадку, що розглядається, (рис. 10.7) створюється пружним елементом (пружиною) і пропорційний а, тобто Мпр=Кα-α, а Моб пропорційний струму (або сукупності струмів, якщо в приладі є більше одного вимірювального кола). Таким чином, кут відхилення стрілки а пропорційний ІВМ і, отже, величині Хв, що вимірюється.
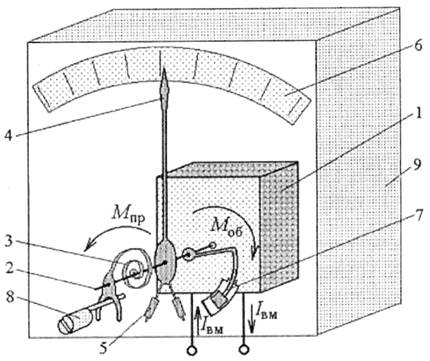
Рис. 10.7
Різноманітні електромеханічні аналогові прилади можуть відрізнятися від варіанта на рис. 10.7 реалізацією окремих елементів і їхнім компонуванням у приладі. До найбільш суттєвих відмінностей може бути віднесене те, що в спеціальному класі цих приладів, в так званих логометрах, протидіючий момент створюється не пружним елементом, а тим же способом, що і Моб. Принцип утворення Моб і конструкція вимірювального механізму визначаються його системою, що більш детально розглядається далі.
На лицьовій панелі електровимірювальних приладів зображується низка умовних позначень, які дозволяють правильно вибрати й експлуатувати прилад. Найпоширеніші умовні позначення подані в табл. 10.1.
Таблиця 10.1
|
Назва |
Позначення |
Назва |
Позначення |
|||||
|
Прилад магнітоелектричний з рухомою рамкою |
|
Тип електричного кола |
постійного струму |
- |
||||
|
Логометр магнітоелектричний |
|
однофазне змінного струму |
~ |
|||||
|
Прилад електромагнітний |
|
постійного і змінного струму |
|
|||||
|
Логометр електромагнітний |
|
трифазне змінного струму |
|
|||||
|
Прилад електродинамічний |
|
Положення шкали |
горизонтальне |
|
||||
|
вертикальне |
|
|||||||
|
Логометр електродинамічний |
|
під нахилом |
|
|||||
|
Заземлення |
|
|||||||
|
Прилад феродинамічний |
|
Напруга випробувальна наприклад, 2 кВ |
|
|||||
|
Логометр феродинамічний |
|
Клас точності приладу, наприклад, 1,5, при різному визначенні ХN |
|
|||||
|
Прилад магнітоелектричний з випрямлювачем |
|
Виконання приладу залежно від умов експлуатації – властивостей навколишнього середовища |
А Б В |
|||||
|
Прилад індукційний |
|
Екран |
електростатичний |
|||||
|
магнітний |
||||||||
|
Прилад електростатичний |
Спільна (вхідна) клема |
* |
||||||
|
Полярність |
від’ємна |
- |
Затискачі кола |
напруги |
U |
|||
|
додатна |
+ |
струму |
I |
|||||
2. Принцип дії електромеханічних приладів різних систем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.








