Проверяют скорость дрейфа wд и, если уход превышает 1 град/ч, его уменьшают до нормы при помощи резистора 3R6 («sin ф»), который находится в приборе ВГ-3.
Завершив работы по уменьшению дрейфа, переключают прибор в режим ГК и определяют постоянную поправку гирокомпаса астрономическим или навигационным способом. Считается нормальным, если постоянная поправка гирокомпаса не превышает 1гр. Величина этой поправки зависит от трех величин: неправильная установка пелоруса относительно диаметральной плоскости (ДП) судна, неточная ориентация основного прибора гирокомпаса по отношению к ДП, неверная выработка сигнала U7. Поэтому предварительно проверяют правильность установки пелорусов и прибора ВГ-1 по отношению к ДП. Если после этого все же постоянная поправка гирокомпаса велика, ее уменьшают до нормы с помощью регулятора 1R19 («Поправка»), расположенного под боковой крышкой внутри прибора ВГ-1.
Эту регулировку обычно выполняют базовые специалисты, так как она связана с применением точной измерительной аппаратуры.
Устойчивость в меридиане определяется пеленгованием отдаленного предмета в течение 4 ч после прихода гирокомпаса в меридиан, с интервалом в 15 мин.
Среднее значение отклонения пеленгов не должно превышать 0,5° и практически не должно изменяться от пуска к пуску.
В порту проверяют качество работы следящей системы: чувствительность, время успокоения колебаний и скорость обработки. Чувствительность характеризуется точностью возвращения шкалы репитера после предварительного рассогласования на небольшой угол (1—2°). Возврат шкалы на прежний "отсчет должен осуществляться с точностью 0,05°. Время успокоения колебания шкалы не должно превышать 5 с. Скорость отработки следящей системы можно считать нормальной, если угол 90° шкала курса проходит за время не более 12 с.
Гироблок
В ГК «Вега» применяется астатический гироскоп, имеющий три степени свободы (рис. 4).
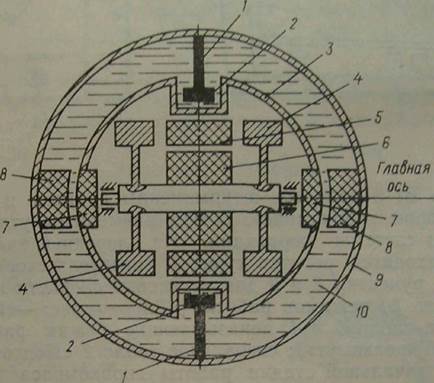 Ротор гироскопа, выполненный в
виде двух симметрично расположенных маховиков 4, помещен в герметичную камеру (гиро-сферу 3). На
роторе гироскопа имеется короткозамкнутая обмотка 6, которая приводится во вращение электромагнитным
полем статор-ной обмотки 5.
Ротор гироскопа, выполненный в
виде двух симметрично расположенных маховиков 4, помещен в герметичную камеру (гиро-сферу 3). На
роторе гироскопа имеется короткозамкнутая обмотка 6, которая приводится во вращение электромагнитным
полем статор-ной обмотки 5.
Такое сочетание гироскопа, с электродвигателем называется гиромотором.
Гиросфера 3 при помощи двух горизонтальных торсионов подвешена в кардановом кольце 2, которое с помощью двух вертикальных торсионов 1 прикреплено к сферическому корпусу 9. (Горизонтальные торсионы на рис. 4 не показаны.) Корпус 9 ги-роблока называется следящей сферой.
Пространство между гиросферой 3 и корпусом 9 заполнено поддерживающей жидкостью 10. При рабочей температуре гиросфера обладает нулевой плавучестью. Гиросфера отбалансирована так что ее центр тяжести совпадает с точкой пересечения тор-
сионов.
Торсионы являются центрирующими элементами. Они также выполняют функцию моментных датчиков: через торсионы на гиросферу налагаются моменты, необходимые для работы гирокомпаса.
Для измерения углов рассогласования гиросферы 3 относительно следящей сферы 9 по двум углам — горизонтальному а и вертикальному β - имеются два двухкоординатных датчика угла. Каждый датчик состоит из статора 7 и ротора 8.
Сигнальные обмотки датчиков включены последовательно, и это исключает ошибку из-за линейного перемещения гиросферы вдоль главной оси.
Гиросфера 3 с торсионами и следящая сфера 9 образуют трехстепенной поплавковый гироблок.
Для питания гиромотора внутрь гиросферы подается трехфазный ток 3— 500 Гц, 40 В. К этой же линии подключены статор-ные обмотки датчиков угла, расположенные на следящей сфере.
На верхней и нижней частях следящей сферы в пазах размещены нагревательные элементы для форсированного разогрева гиро-блока при пуске. На боковой стенке закреплен биметаллический термодатчик, отключающий нагревательные элементы при температуре 75°С.
ФУНКЦИОНАЛЬНАЯСХЕМАГИРОКОМПАСА
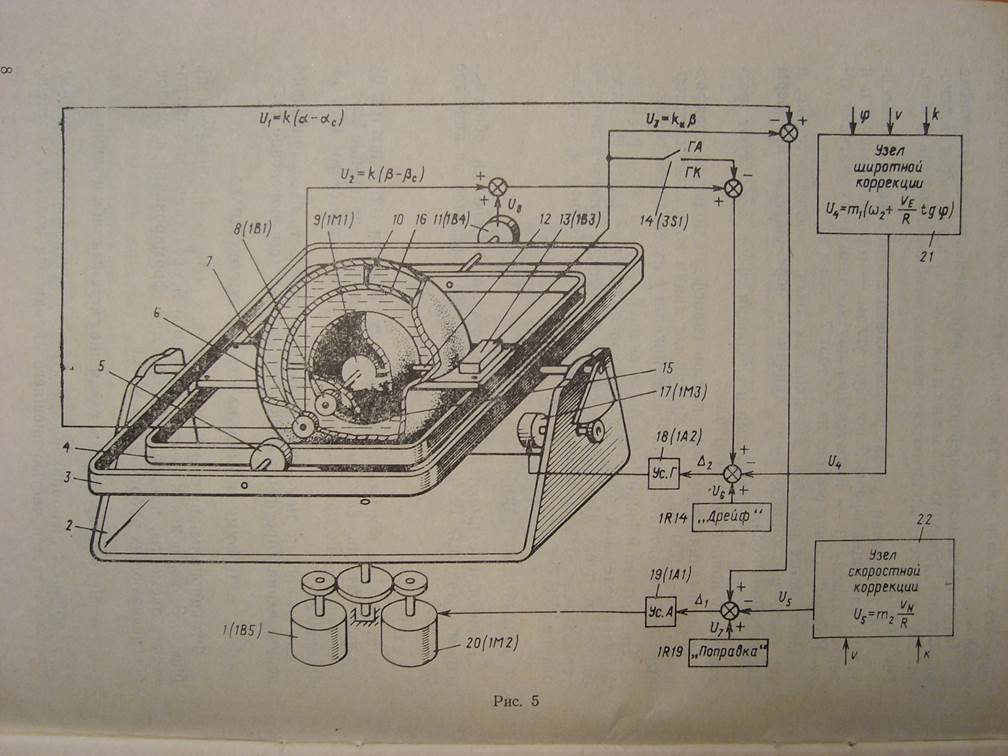
Функциональная схема гирокомпаса «Вега» изображена на рис. 5. Здесь показан подвес гироблока и представлены электрические элементы, предназначенные для формирования сигналов, обеспечивающих работу гирокомпаса.
Подвес гироблока и следящие системы стабилизации
Гироблок 6 неподвижно крепится в установочном кольце 4, которое является частью внешнего карданова подвеса, обеспечивающего гироблоку три степени свободы. Установочное кольцо 4 на горизонтальных цапфах, параллельных главной оси гироскопа, подвешено в подшипниках горизонтального кольца 3. Для погашения колебаний гироблока вокруг главной оси имеется масляный демпфер 5.
Горизонтальное карданово кольцо 3 установлено на цапфах в подшипниках вертикального кольца 2, выполненного в виде вилки.
С горизонтальным кольцом 3 через редуктор связан двигатель горизонтной стабилизации 17 (1МЗ), установленный на вертикальном кольце 2.
Вертикальное кольцо 2 установлено в подшипниках корпуса основного прибора. С вертикальным кольцом 2 через редуктор связан двигатель азимутальной стабилизации 20 (1М2), установленный на корпусе основного прибора, а также датчик курса 1 (1В5).
К нижней части следящей сферы прикреплен груз, который создает маятниковость и обеспечивает вертикальное положение гироблоку при качке судна. (Следует помнить, что гиросфера маятниковостью не обладает.)
На установочном кольце 4, кроме гироблока 6 и демпфера 5, размещены индикатор горизонта 13 (1ВЗ) и поворотный трансформатор 11 (1В4). Индикатор горизонта 13 вырабатывает основной сигнал, необходимый для преобразования свободного гироскопа в гирокомпас.
Поворотный трансформатор 11 вырабатывает вспомогательный сигнал, повышающий точность гирокомпаса в условиях качки.
Торсионный подвес требует для нормальной работы непрерывной раскрутки торсионов. Для этой цели с двухкоординатного датчика угла 7, 8 (1В1) снимаются сигналы U1 и U2пропорциональные рассогласованию следящей сферы относительно гиросферы (по углам а и β ). Для усиления сигналов U1 и U2имеются два усилителя: усилитель азимутальной стабилизации (Ус. А) 19 (1А1) и усилитель горизонтной стабилизации (Ус. Г) 18 (1А2).
После усиления сигналы поступают на двигатели азимутальной (1М2) и горизонтной (1МЗ) стабилизации. При вращении этих двигателей происходит непрерывное слежение следящей сферы за гиросферой. Так как при этом на гиросферу не налагаются никакие моменты внешних сил (торсионы раскручены), чувствительный элемент работает в режиме «свободного» гироскопа.
Для превращения «свободного» гироскопа в гирокомпас, а также для исключения погрешностей гирокомпаса на двигатели 1М2 и 1МЗ подаются дополнительные сигналы. Они обеспечивают В закрутку торсионов на определенные углы, необходимые для создания управляющих и корректирующих моментов. На рис. 5 также показаны гиромотор 9 и кольцо 16.
 |
|
ю- |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.