Автоматика – отрасль науки и техники, которая занимается разработкой методов и технических средств для освобождения человека от выполнения функций контроля и управления производственными процессами.
Автоматизация – совокупность организационных и технических мероприятий, с целью освобождения человека от выполнения функций контроля и управления производственным процессом с передачей этих функций автоматически действующим устройствам и системам.
Источники экономической составляющей использования АС.
1) Повышение производительности оборудования
2) Снижение расхода эл.энергии, материалов, реагентов на единицу продукции
3) Улучшение качества готовой продукции
4) Увеличение межремонтных сроков эксплуатации оборудования
5) Улучшение условий труда
6) Снижение численности обслуживающего персонала
7) Улучшение экологической обстановки
Основным показателем технико-экономической эффективности автоматизации является срок окупаемости затрат на оборудование.
Т=А/Б-В
А - первоначальные капитальные затраты на автоматизацию
Б – экономия производственных затрат за счет автоматизации
В – увеличение годовых амортизационных отчислений за счет внедрения средств автоматизации и расходы на ремонт и обслуживание этих средств
Основы измерительной техники
Погрешность ∆=Xи - Xд
Поправка П=Xд - Xи
Относительная погрешность δ= (∆/Хд)*100%
Абсолютная погрешность ∆<<Хи и Хд
Приведенная погрешность γ=(∆/ХN)*100% ХN- нормируемое значение
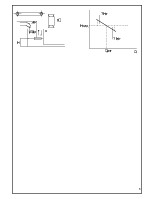
Чувствительность – это отношение перемещения указателя к изменению измеряемой величины, вызванное этим перемещением.
1 – пропорциональная
2 – линейная
3 – криволинейная
 Для того чтобы найти данные в точке А необходимо
провести касательную найти угол и решить y=kx,
где к – угол.
Для того чтобы найти данные в точке А необходимо
провести касательную найти угол и решить y=kx,
где к – угол.
Порог чувствительности – наименьшее изменение измеряемой величины на которую реагирует прибор.
Порог чувствительности ограничивает зону нечувствительности
- зона чувствительности ограничивает зону не чувствительности
Вариация – это разность между показаниями прибора
соответствующими одному и тому же значению измеряемой величины при прямом и
обратном ходе.
Класс точности – обобщенная метрологическая характеристика, характеризующая его точность.
0,5=300±5°C – равномерная 0,5=300±1,5°C –
погрешность неравноме
Основные методы измерения:
1) Прямые. Численное значение измеряемой величины определяется путем непосредственного сравнения ее с единицей измерения или по шкале прибора, заранее проградуированной в данных единицах измерения.
2) Косвенные. Измеряемая величина определяется, по какой либо формуле где она является функцией других величин определенных прямыми методами измерения.
3) Совокупные. Одновременно измеряются несколько одноименных, составляется система уравнений из результатов прямых измерений различных сочетаний этих величин, решается система и определяются искомые величины.
4) Совместные. Одновременно измеряется несколько разноименных величин с целью определения зависимости между ними.
lt=lo(1+αt+βt²) lo+ loαt1+ loβt²1-L=α
L – мера lo+ loαt2+ loβt²2-L=b
lt1 – L=a lo+ loαt3+ loβt²3-L=c
lt2 сравним с L, получаем b (lt2 – L= b)
lt3 – L=с
пусть
l0 – L=x
l0 *x = y
l0 *β = z
По способу использования, меры для получения численного значения измеряемой величины различают:
1) Метод непосредственной оценки. Численное значение искомой величины определяется по шкале прибора заранее проградуированной с помощью многозначной меры.
2) Нулевой метод. В измерительном приборе действие измеряемой величины уравновешивается, компенсируется действием другой заранее известной величины, в результате указатель прибора не испытывает никакого воздействия.
3) Дифференциальный. В этом случае измерительный прибор измеряет разность между измеряемой величиной (искомой) и другой заранее известной.
4) Метод замещения. В измеряемом приборе измеряемая величина заменяется заранее известной величиной.
5) Метод совпадений. В этом случае ряд равномерных отметок соответствующих измеряемой величине сопоставляется с рядом равномерных отметок соответствующих заранее известной величине. Значение искомой величины определяется по совпадению отметок. (на осциллограф подаются 2 сигнала и сравниваются).
Все методы измерения делят на лабораторные и технические. При лабораторных измерениях измеряют погрешность результатов измерения. При технических измерениях погрешность результатов измерения не определяют, а лишь принимают во внимание класс точности измеряемого прибора.
Терминология, классификация, принцип действия и общие свойства АСР.
Агрегат, машина, установка или технический процесс в которых необходимо поддерживать на заданном уровне или изменять по какой то временной программе один или несколько параметров, называют объектом автоматического регулирования или управления.
Автоматически действующие устройства, реализующие задачу регулирования называют автоматический регулятор.
Совокупность объектов регулирования и автоматического регулятора называют АСР.
АСР бывают: разомкнутые и замкнутые.
ОА – объект автоматизации
АР – автоматическое регулирование
ВВ – возмущающее воздействие
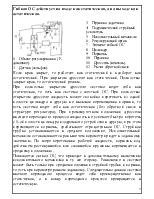
Блок схема АСР.
1 – Объект регулирования
f(t) – возмущающее воздействие (в данном случае время)
2 – датчик ( ПИП – первичный измерительный преобразователь. Воспринимает изменения регулируемой величины и преобразует эти изменения в сигнал удобный для последующего использования.)
X1 – температура
X2 – измеренный сигнал
3 – задатчик (служит для изменения заданного значения параметра)
Xо – задающее воздействие
4 – элемент сравнения (служит для сравнения заданного параметра с текущим)
АX – сигнал рассогласования (сигнал ошибки)
5 – усилительно-преобразовательное устройство.(усиливает сигнал рассогласования АX и формирует соответствующий закон регулирования)
6 – исполнительный механизм
7 – регулирующий орган (служит для изменения подачи вещества или энергии в объект или из объекта таким образом, чтобы параметр поддерживался на заданном уровне)
АСР бывают прямого и не прямого действия.
В АСР прямого действия нет дополнительного источника энергии для работы регулятора. В таких системах регулирующий орган перемещается за счет энергии развиваемой датчиком.
Системы АСР бывают прерывного и непрерывного действия. В системах АСР непрерывного действия структура связи между отдельными элементами в процессе работы, система остается неизменной. В АСР прерывного действия изменяется.
По характеру задающего воздействия (Xо) АСР бывают:
1 - Стабилизирующие (Xо=const)
2 - Программные Xо=f(t), f(t) – известная функция времени.
3 - Следящие Xо=f(t), f(t) – произвольно изменяющаяся функция времени
![]()
у – перемещение регулирующего органа
x – изменение регулируемого параметра
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.