Следует отметить только, что кроме линейчатой маски для реализации абсолютных шифраторов пригоден и кодирующий диск (рис. 27).
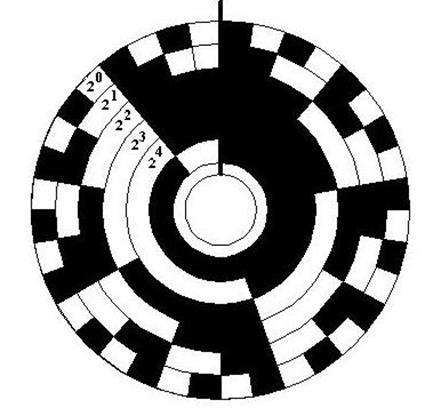
Рис. 27
Существуют варианты в выборе кода для кодирования дорожек маски шифраторов. Критерием сравнения кодов могут служить закономерности распределения нулевых и единичных разрядов на границах переходов от одного числа к другому.
При простом двоичном коде (рис. 26) переход от дорожки, обозначающей число 7, к дорожке, соответствующей числу 8, происходит изменение четырёх значащих позиций разрядов. Поэтому при наличии пусть небольшой погрешности юстировки (выверки, регулировки) считывающих головок вместо 01000 (число 8) можно считать 01111 (число 15), а в месте перехода от 15 к 16 – считать 31 вместо 16. Поскольку вероятность таких погрешностей расположения существует, следует хотя бы постараться свести нежелательные последствия этих ошибок к минимуму.
Средством достижения этого, как правило, оказывается выбор кода Грея. Он получается из обычного двоичного путём сложения по модулю 2 комбинации двоичного кода с ней же, но сдвинутой на один разряд вправо, при этом младший разряд сдвинутой комбинации не учитывается. Например, число 4 в двоичном коде записывается как 0100, сдвиг её вправо даёт 0010, а их сумма по модулю 2 – комбинация кода Грея - будет 0110. Если теперь записать несколько чисел в коде Грея: 1 - 0001; 2 - 0011; 3 - 0010; 4 - 0110; 5 - 0111, то станет понятной его основная особенность: любые две соседние комбинации отличаются друг от друга только в одном разряде. Поэтому при любых неточностях установки считывающего блока относительно кодирующих дорожек ошибка не должна превысить разницы между соседними числами, например 8 вместо 7 (рис. 28), а не 15 вместо 8, как это было при двоичном коде. Это и послужило основной причиной почти повсеместного применения кода Грея для кодирования масок абсолютных дешифраторов.

Рис.28
Использование линейчатых масок не всегда бывает самым удобным вариантом построения абсолютных шифраторов. Раньше уже упоминался кодирующий диск. Он даёт абсолютный отсчёт углового смещения в пределах одного оборота и после возврата на нулевые показания начинает новый цикл отсчёта. Чтобы придать кодирующему диску способность подсчитывать обороты, поступают следующим образом.
Однооборотный шифратор на основе кодирующего диска дополняется встроенным редуктором, число оборотов которого в некотором диапазоне значений тоже кодируется. Порядок величин таков: однооборотный шифратор за 360° полного оборота может обеспечить 8192 отсчёта (для этого используется 13–битовый код измерений); встроенный редуктор кодируется 12–битовым кодом, что позволяет зафиксировать до 4096 оборотов, поэтому общая разрядность абсолютного шифратора на основе кодирующего диска равна 25. Чтобы сделать возможным использование датчика угловых величин для измерения линейных перемещений, надо лишь обеспечить вращение вала шифратора при его линейном перемещении (для этого применимы любые варианты преобразования движений: пары “зубчатая рейка – шестерня”, ” ходовой винт – гайка “ и т.д.).
2.3. Повышение точности шифраторов перемещений
Из рассмотрения структуры кодовых дорожек линейчатых масок и кодирующих дисков видно, что протяжённость кодирующих элементов и расстояний между ними минимальна на позициях младшего разряда. Именно эта дорожка определяет предельную частоту изменения сигнала на выходе схемы считывания, которая тем больше, чем выше точность преобразования перемещения в код, так как при большей точности на единицу перемещения должно приходиться больше импульсов. В одном из вариантов для этого пришлось бы уменьшать период расположения кодирующих сегментов, но делать это сверх определённого предела не следует.
Несомненным достоинством применяемых методов построения шифраторов является возможность дополнительной электронной обработкой считываемых сигналов в некоторой степени компенсировать предельные ограничения, обусловленные кодирующей маской.
На рис. 29 показано, что если сигналы, считываемые по каналам А и В, сложить по модулю 2 (исключающее ИЛИ на два входа), то получающаяся импульсная последовательность приобретает двойную частоту по сравнению с исходными, как если бы вдруг улучшилась вдвое разрешающая способность самой маски.
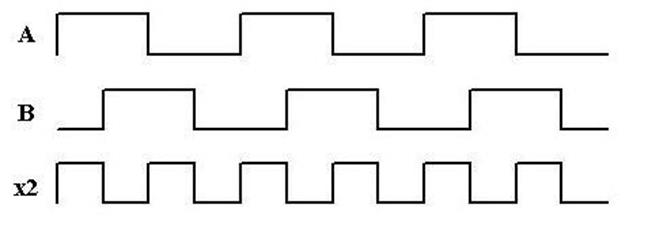
Рис. 29
Рисунок 30 иллюстрирует способ достижения учетверённой разрешающей способности, обеспечиваемой схемой обработки сигналов по сравнению с возможностями кодирующей маски. Для этого схема считывания формирует импульс неизменной длительности при каждом переключении в импульсных последовательностях каналов А и В.
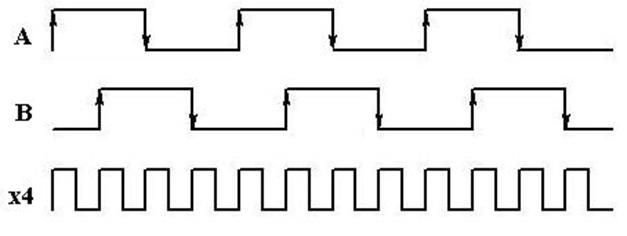
Рис. 30
За счет использования таких приёмов точность позиционирования подвижных агрегатов машин удаётся довести до уровня 1 мкм.
Сигналы с датчика в общем случае приходят в произвольные моменты времени относительно временного цикла, допустим, микропроцессорной схемы обработки. Для привязки положения фронтов сигнальных импульсов они стробируются импульсами тактового генератора, после чего становится возможным выполнение всех необходимых процедур.
ТЕМА 3. ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
3.1. Назначение, варианты, схемы подключения
Одной из наиболее динамично развивающихся областей техники в настоящее время являются контроллеры – устройства, предназначенные для выполнения задач управления [4,5].
Для ознакомления с контроллерами как семейством управляющих устройств выбран a-контроллер MITSUBISHI, и первые сведения, с которыми обязательно нужно ознакомиться, касаются расположения органов управления, вариантов подключения, технических характеристик и программирования.
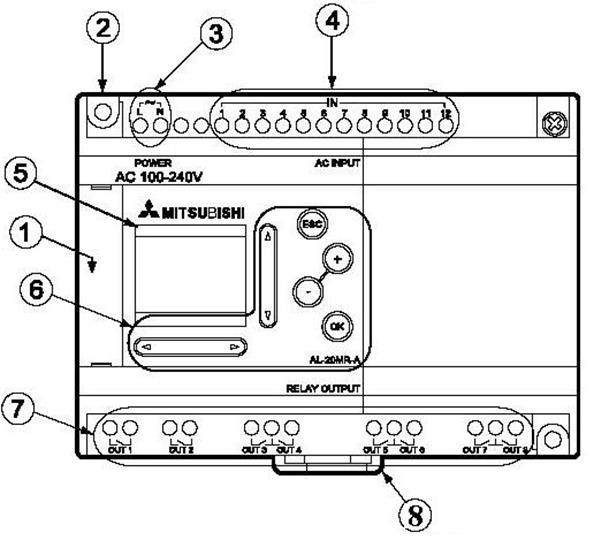
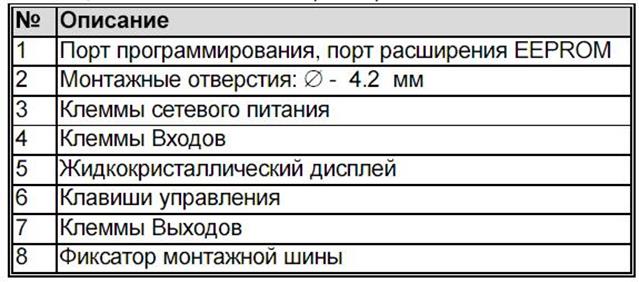
Рис. 31
Внешний вид контроллеров семейства a со стороны лицевой панели показан на рис. 31.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.