









Министерство сельского хозяйства Российской Федерации ФГОУ ВПО Красноярский государственный аграрный университет
Кафедра системоэнергетики
Курсовой проект
Тема: Электропривод поточной линии переработки кормов
Выполнил: студент гр. ЭТФ 59
Власова Н.В.
Проверил: преподаватель
Кулаков Н.В.
Красноярск 2008
Содержание
Введение
1. Технологическая и кинематическая схема установки
2. Выбор электродвигателя:
- по роду тока
- по скорости вращения
-выбор типа передачи
- выбор двигателя по мощности
- выбор двигателя по степени защиты
- по климатическому исполнению
- по категории размещения
- выбор преобразовательного устройства
- по способу монтажа
3. Расчёт и построение механической характеристики и нагрузочной диаграммы рабочей машины
4. Расчёт переходных процессов в электроприводе
5. Разработка схемы автоматического управления
6. Выбор аппаратуры управления и защиты
7. Выбор проводов и кабелей
8. Разработка схем соединений и внешних подключений.
Используемая литература.
Введение
Электропривод автоматизированных поточных линий
Поточная линия — это система рабочих машин, механизмов и аппаратов, выполняющая один законченный технологический или производственный цикл, который характеризуется поточностью, непрерывностью и ритмичностью рабочего процесса и выдвигает определенные требования к автоматизированному электроприводу и технике безопасности.
Концентрация машин и оборудования, размещение их и разных местах по площади и уровню, тесная взаимосвязь и регламентированная последовательность их работы в поточных линиях требуют осуществления дистанционного, нейтрализованного и автоматического управления. При этом пульт управления устанавливается в производственном цехе ближе к основным агрегатам в месте с наиболее удобным обзором рабочих машин.
Электрические связи между отдельными элементами поточных линий весьма сложны (большое число связей с контрольной и сигнальной аппаратурой, датчиками и другим электрооборудованием). Тип и мощность электродвигателей для, аппаратуры управления и защиты выбирают отдельно для каждого потребителя в технологической схеме.
Условия работы сельскохозяйственных электроприводов.
Помимо приводных характеристик машин, для выбора рационального электропривода необходимо учитывать условия окружающей среды и электроснабжения. Ряд сельскохозяйственных помещений отличается высоким содержанием химически активных веществ в сочетании с высокой влажностью окружающей среды (животноводческие помещения), запыленностью (мельницы, зернотоки, деревообделочные мастерские). Кроме того, электродвигатели часто работают на открытом воздухе, подвергаясь непосредственному воздействию атмосферных воздействий.
Наиболее агрессивное включение атмосферы помещений — аммиак, содержание которого в животноводческих помещениях колеблется в широких пределах (в свинарниках — 0,2. . .0,04, в коровниках — 0,05. . .0,018 мг/л). Относительная влажность достигает 90. . .98%. Углекислый газ, взаимодействуя с водой, образует слабую неустойчивую кислоту, существенно не влияющую на изоляцию, но усиливающую коррозию металлов. При таких тяжелых условиях их окружающей среды и малом числе часов работы в сутки, когда двигатели не успевают «самоосушиться», сопротивление изоляции электрооборудования быстро снижается. Поэтому электрооборудование для животноводческих помещений должно быть рассчитано на работу в среде с относительной влажностью до 90. . .100% при содержании паров аммиака до 0,2 мг/л.
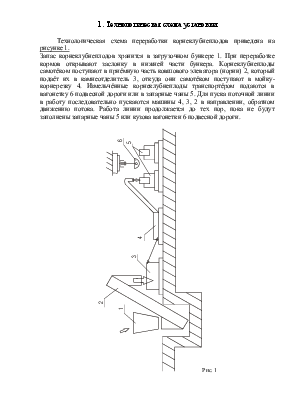
Запас корнеклубнеплодов хранится в загрузочном бункере 1. При переработке кормов открывают заслонку в нижней части бункера. Корнеклубнеплоды самотёком поступают в приёмную часть ковшового элеватора (нории) 2, который подаёт их в камнеотделитель 3, откуда они самотёком поступают в мойку- корнерезку 4. Измельчённые корнеклубнеплоды транспортёром подаются в вагонетку 6 подвесной дороги или в запарные чаны 5. Для пуска поточной линии в работу последовательно пускаются машины 4, 3, 2 в направлении, обратном движению потока. Работа линии продолжается до тех пор, пока не будут заполнены запарные чаны 5 или кузова вагонетки 6 подвесной дороги.
 Рис. 1
Рис. 1
2. Выбор электродвигателя
Определю потребную мощность электродвигателя для привода нории.
![]()
Q – производительность нории, кг/с
H – высота подъёма материала, м
hн – КПД нории (для наклонного перемещения - 0,6)
hп – КПД передачи от двигателя к нории (для цепной передачи - 0,98)
j - коэффициент заполнения ковшей
i – вместимость одного ковша, м3
l – расстояние между ковшами, м
u - скорость движения ковшей, м/с
g - насыпная плотность транспортируемого материала (для корнеклубнеплодов 450 кг/м3)
|
№ варианта |
Высота подъёма материала Н, м |
КПД нории |
Коэффициент наполнения ковшей |
Ёмкость одного ковша i, м3 |
Расстояние между ковшами l, м |
Скорость движения ковшей u, м/с |
|
93 |
0,4 |
0,6 |
0,7 |
0,4 |
0,5 |
0,4 |

![]()

Выбор электродвигателя
1. По роду тока и величине напряжения:
~I, Uн= 380/220В
2. По скорости вращения:
nн.д.³nн

nдв.³ nраб. м
750>25,4
3. Выбор типа передачи:
Передаточное число от
двигателя к рабочей машине: 
Принимаю цепную передачу на редуктор горизонтальный цилиндрический 2-х ступенчатый типа ЦДГ-(2Т-40)Бм
nред.вх. =500-1500
h=0,96
4. По мощности:
Рдв.³Рпотр.
Рдв.=2,2 кВт
Рпотр.=1,87 кВт
5. По степени защиты: IP 54
6. По климатическому исполнению: У3
Окончательно принимаю двигатель асинхронный с короткозамкнутым ротором 4А112МА8У3.
|
Марка двигателя |
Рном., кВт |
nном., об/мин |
КПД, о.е. |
cosj |
|
|
|
|
J, кг×м2 |
|
4А112МА8У3 |
2,2 |
700 |
0,765 |
0,71 |
2,2 |
1,9 |
1 |
5 |
0,017 |
3. Расчёт и построение механической характеристики и нагрузочной диаграммы рабочей машины

Мс.н.=Р/w
М0»0,1-0,2 Мс.н
i – передаточное число
М0 – момент сопротивления, не зависящий от скорости
Мс.н – момент при номинальной частоте вращения
-1 – показатель степени механической характеристики

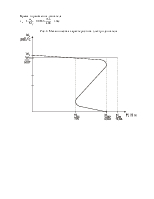
Механическая характеристика рабочей машины (нории) и нагрузочная диаграмма приведены на рисунке 2.
 Рис. 2
Рис. 2
4. Расчёт переходных процессов
Jдв.=0,017 кг×м2
к1 = 5 (для нории)
к2 = 1,2
Jраб.м = Jдв.×к1

Расчёт и построение механической характеристики
1. Номинальная скорость двигателя

2. Номинальный момент двигателя
![]()
3. Пусковой момент
![]()
4. Минимальный момент
![]()
5. Максимальный момент
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.



