УДК 519.81 Е.В. Григоров, И.В. Лысенко
В настоящее время широкое распространение получили электронные тензометрические весы. Они применяются для взвешивания грузов как в статическом положении, так и в динамике (в движении). Настоящая статья предназначена для краткого ознакомления заинтересованного читателя со структурами измерительных схем электронных весов, проблемами, возникающими при их построении и алгоритмами цифровой обработки информации, применяемыми в программном обеспечении весов.
Платформенные тензометрические весы состоят из следующих основных узлов:
· грузоприёмного устройства в виде платформы, опирающейся на четыре тензометрических датчика силы;
· аналого-цифрового преобразователя (АЦП), преобразующего сигнал от датчиков в цифровую форму;
· микроконтроллера, управляющего АЦП и обрабатывающего цифровые данные;
· индикатора, отображающего результаты взвешивания в наглядной форме.
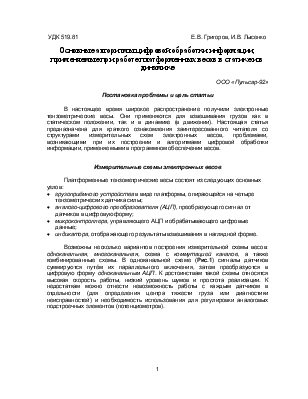
Возможны несколько вариантов построения измерительной схемы весов: одноканальная, многоканальная, схема с коммутацией каналов, а также комбинированные схемы. В одноканальной схеме (Рис.1) сигналы датчиков суммируются путём их параллельного включения, затем преобразуются в цифровую форму одноканальным АЦП. К достоинствам такой схемы относятся высокая скорость работы, низкий уровень шумов и простота реализации. К недостаткам можно отнести невозможность работы с каждым датчиком в отдельности (для определения центра тяжести груза или диагностики неисправностей) и необходимость использования для регулировки аналоговых подстроечных элементов (потенциометров).
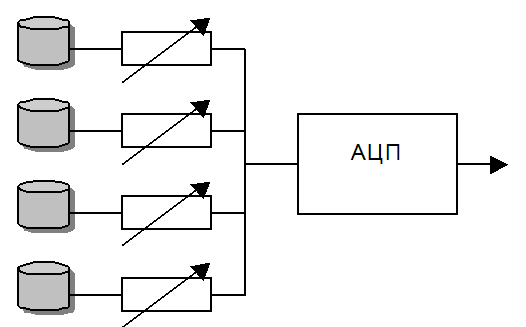
Рис. 1
В многоканальной схеме (Рис.2) сигнал каждого датчика преобразуется отдельным АЦП, и суммирование происходит уже в цифровой форме в микроконтроллере. Эта схема так же, как и предыдущая, имеет высокую скорость работы и достаточно низкий уровень шума. К тому же появляется возможность работы с каждым датчиком в отдельности: измерение уровня сигнала, регулировка коэффициента преобразования, диагностика и т.д. Недостатки – сложность и повышенная стоимость.
В схеме с коммутацией каналов (Рис.3) датчики подключаются к одноканальному АЦП через электронный коммутатор. Измерение по каждому каналу происходит поочерёдно путём последовательного подключения входа АЦП к каждому датчику. Эта схема проще и дешевле предыдущей, она позволяет работать с каждым датчиком в отдельности, но имеет и свои недостатки. Это низкая скорость работы, неодновременность измерения по каналам, высокий уровень шумов и повышенная чувствительность к помехам с частотой переключения коммутатора.
Далее будет рассмотрена последняя схема, как наиболее перспективная для применения в статодинамических весах. Для повышения скорости работы этой схемы применяются быстродействующие АЦП. Другие недостатки устраняются или ослабляются применением специальных алгоритмов обработки данных, поступающих от АЦП.

Рис. 2
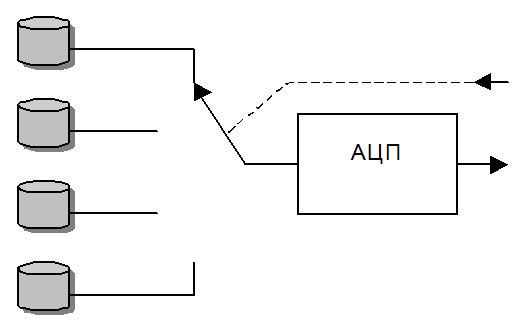
Рис. 3
Перед рассмотрением этих алгоритмов представим сам процесс взвешивания. Упрощённо он изображён на Рис.4:
Рис. 4
Здесь цифрами обозначены:
1 – помещение груза (заезд транспортного средства) на платформу.
2 – взвешивание (считывание показаний).
3 – снятие груза (съезд транспортного средства) с платформы.
Взвешивание в статике и в динамике отличается только 2-й фазой. При взвешивании в статике груз находится на платформе в относительной неподвижности (возможны небольшие колебания). При взвешивании в динамике груз перемещается от одного края платформы к другому.
Микроконтроллеру, обрабатывающему сигналы датчиков необходимо решить следующие задачи. При взвешивании в статике:
- быстро выдать новые данные о весе груза, помещённого на платформу (фаза 1);
- устранить шумы и колебания веса в процессе взвешивания, точно измерить вес груза (фаза 2);
- быстро возвратиться к нулю после снятия груза с платформы (фаза 3).
При взвешивании в динамике:
- надёжно идентифицировать заезд транспортного средства (оси или колеса) на платформу, исключить лишние выбросы и провалы (фаза 1);
- как можно более точно измерить вес груза независимо от его скорости и направления движения по платформе (фаза 2);
- надёжно идентифицировать съезд транспортного средства (оси или колеса) с платформы (фаза 3).
Для повышения точности измерений применяется передискретизация по уровню (повышение разрядности АЦП). Для устранения шумов и выбросов применяется цифровой фильтр низких частот (ФНЧ). Влияние движения груза по платформе исключается путём интерполяции результатов последовательных измерений на разных каналах к одному моменту времени.
Передискретизация по уровню (статистическое интегрирование) позволяет повысить число двоичных разрядов АЦП и понизить уровень шумов. Её алгоритм достаточно простой: складываются N соседних измерений и выдаются как одно. При этом число двоичных разрядов повышается в log2N раз и в N раз снижается скорость измерений. Уровень шумов в идеале понижается в ÖN раз. Как ни странно, но обязательным условием работы этого алгоритма является наличие во входном сигнале шума с амплитудой не менее ½ младшего значащего разряда АЦП. Желательно, чтобы этот шум имел симметричное распределение амплитуд и равномерный спектр, так как эти параметры влияют на качество передискретизации.
Принцип передискретизации используется в работе сигма-дельта-АЦП: входной аналоговый сигнал преобразуется в 1-битный цифровой, который затем передискретизируетя до нужного количества разрядов и фильтруется цифровым ФНЧ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.