В этом случае погрешность измерения будет
равна сумме погрешностей звеньев ![]() .
.
1к.л) Если Х неудобна для преобразования в указанные сигналы, но удобна для сравнения (ток или механический момент), то целесообразно использовать замкнутую структуру преобразования.
Лекция 9
Регистры. Схемы их построения и функционирование в составе ЦСИ. Их характеристики.
В цифровых устройствах для хранения информации применяются запоминающие устройства. Хранимая информация может быть представлена как в аналоговой, так и в цифровой форме. Наиболее часто используются цифровые регистры.
Цифровая память: ПЗУ, ППЗУ, ОЗУ.
Информация в ПЗУ записывается один раз и не перепивается.
ППЗУ – перепрограммируемое ЗУ. Информация может храниться бесконечно долго без подачи питания. Для стирания информации необходимы специальные меры (УФ стирание).
ОЗУ – информация хранится до тех пор, пока на него подаётся питание. Хранимая в ОЗУ информация постоянно обновляется. Поэтому пропадание питания на мкс стирает информацию в ОЗУ.
По принципу действия ЗУ бывают постоянные и динамические.
Постоянные – ПЗУ и ППЗУ.
По методу доступа к информации ЗУ бывают с произвольной и последовательной выборкой.
Элементарным устройством для хранения информации является регистр. Регистры бывают параллельные и последовательные.
Элементарным устройством для хранения двоичных разрядов является триггер.
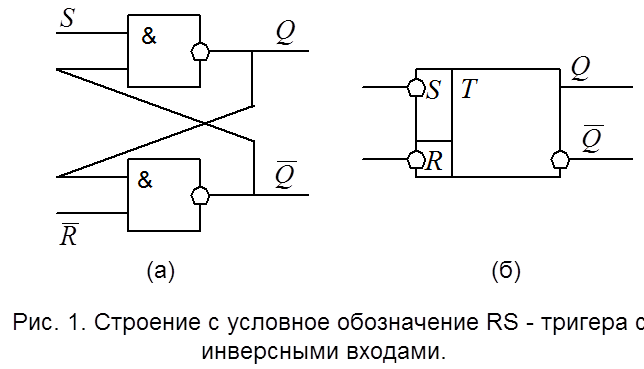
При поданном питании RS-триггер
может хранить информацию бесконечно долго. У RS-триггера
есть два входа: S-вход устанавливает триггер
в состояние хранения; R-вход
переводит триггер в начальное состояние, предварительно стирая информацию. У
триггера два выхода: ![]() и
и ![]() .
Для записи в RS-триггер логической единицы
необходимо подать на вход S
ноль. RS-триггер с инверсными
входами работает точно также, но управляющими являются не логические единицы, а
нули.
.
Для записи в RS-триггер логической единицы
необходимо подать на вход S
ноль. RS-триггер с инверсными
входами работает точно также, но управляющими являются не логические единицы, а
нули.
Отметим, что RS-триггер является асинхронным, то есть записывает информацию в момент её поступления. Для ЦСИ удобнее записывать информацию в определённые моменты времени по сигналу записи. Для этого используются синхронные или тактируемые триггеры.
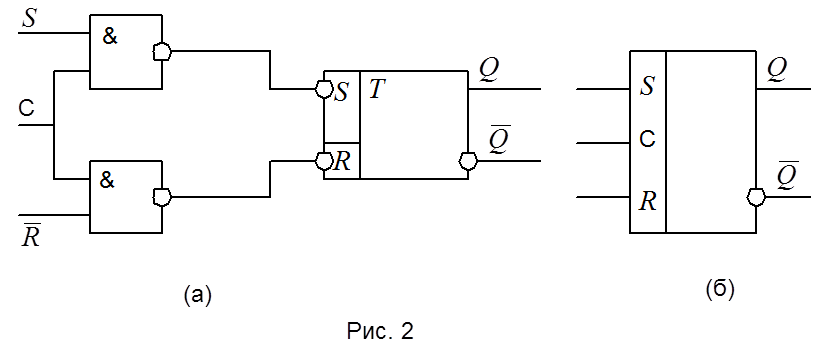
RSС-триггер способен записывать или стирать информацию только при подаче на вход логической единицы (рис. (2)).
Недостатком RSС-триггера является необходимость подачи двух разнополярных сигналов на входы R и S. Такого недостатка лишены D-триггеры, которые строятся на основе RSС-триггера.
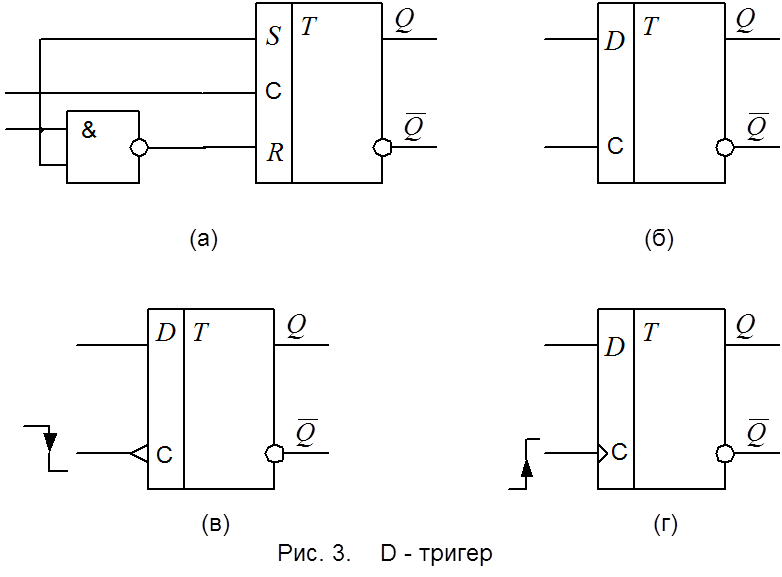
На рис. (3,а) изображена схема D-триггера, построенная на RSС-триггере и одном элементе 2И-НЕ. На рис. (3б) изображено условное обозначение D-триггера. Рис. (3в) – D-триггер, который меняет свое состояние не по уровню сигнала на входе С, а по его заднему фронту. Рис. (3г) – триггер, меняющий своё состояние по переднему фронту тактирующего сигнала.
D-триггер от delay (задержка).
В ЗУ кроме D-триггеров используются D-триггеры с дополнительными входами RS, которые по отклонению к С- , D-входу являются приоритетными, то есть в независимости от состояние D и С в триггер записывается информация со входов R и S.
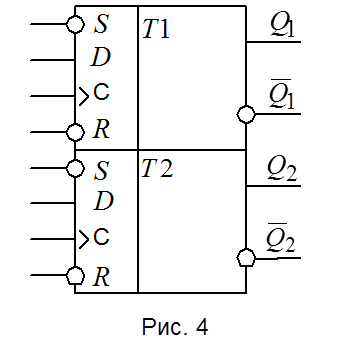
Микросхема К155ТМ2 содержащая 2 D – триггера с инверсным RS – входами.
На основе D-триггеров строятся регистры для хранения двоичных чисел.
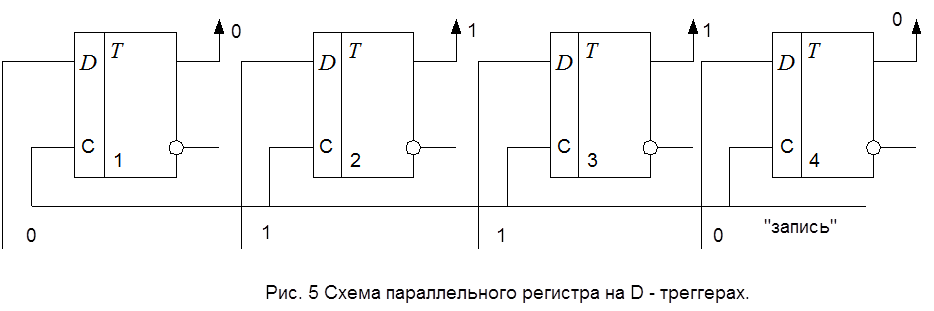
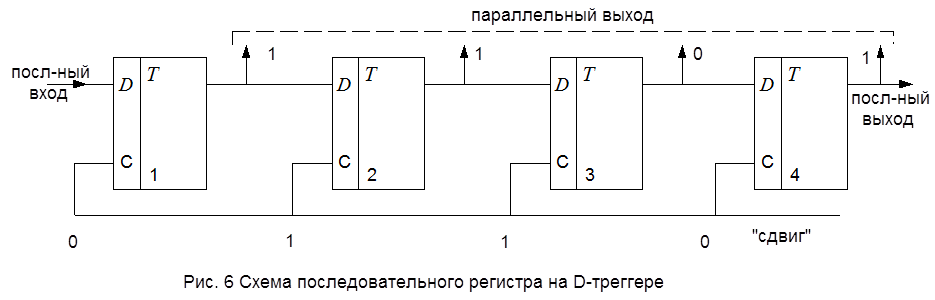
Регистры бывают параллельные, последовательные и последовательно-параллельные.
Лекция 10
Динамическая индикация.
Статическая индикация – это индикация, при которой каждый разряд числа отображается постоянно.
Динамическая индикация –это индикация, при которой разряды отображаемого числа загораются поочерёдно.
Вспышки разрядов становятся незаметными при
условии, что частота ![]() 24 Гц.
24 Гц.
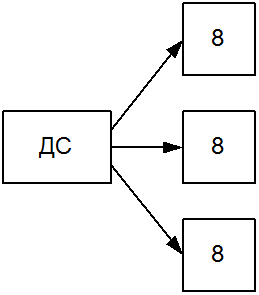
Рассмотрим временную диаграмму на один из трёх разрядов индикатора с динамической индикацией.
 ,
,  , n –
число разрядов индикатора.
, n –
число разрядов индикатора.
Практика показывает, что при динамической индикации качество свечения цифр получается выше, чем при статической, что объясняется большой амплитудой импульсного тока питания. Ток питания при статической индикации ограничен максимальной рассеиваемой мощностью индикатора или ограничениями максимального тока блока питания.
Цифровые частотомеры.
Зарисуем схему цифрового частотомера (1):
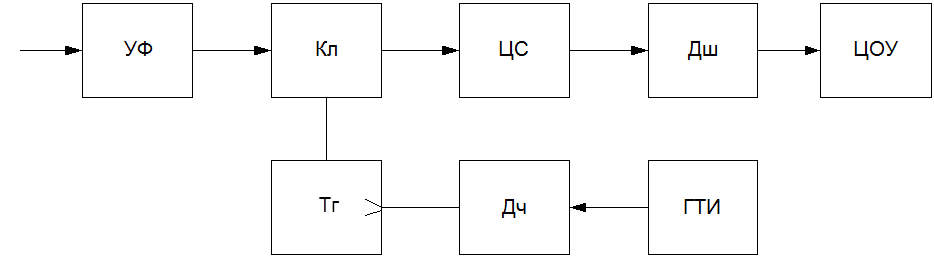
Переменный сигнал с измеряемой частотой
подаётся на усилитель –формирователь (УФ), который генерирует импульсы с
частотой измеряемого сигнала. Генератор тактических импульсов (ГТИ) выдает
импульсы, у которых частота делится делителем частоты (ДЧ). Делитель частоты
задает время измерения tу.
Триггер Тг управляя ключом Кл, позволяет подавать измеренный сигнал на цифровой
счетчик ЦС на протяжении времени измерения. Далее результаты измерения за один
интервал преобразуются дешифратором ДШ и подаются на большие ЦОУ. 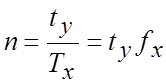 – количество импульсов, подсчитанное
счетчиком.
– количество импульсов, подсчитанное
счетчиком.
Наиболее целесообразно выбирать интервал
измерения 1 с. В таком случае ![]() . Относительная
погрешность квантования:
. Относительная
погрешность квантования: 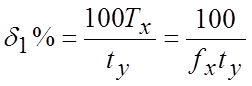 (1). Из выражения
(1) получим минимальную частоту, которую можно измерить такой схемой:
(1). Из выражения
(1) получим минимальную частоту, которую можно измерить такой схемой: 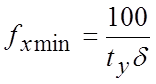 (2). Как можно увидеть из (2),
высокая точность измерений будет только у высокочастотного сигнала. Поэтому для
измерения низкочастотных сигналов измеряют их период.
(2). Как можно увидеть из (2),
высокая точность измерений будет только у высокочастотного сигнала. Поэтому для
измерения низкочастотных сигналов измеряют их период.
Существует три основных погрешности, влияющих на измерение частоты:
а) погрешность квантования ![]() , создаваемая генератором тактовых
импульсов из-за нестабильности его частоты, которая может возникать из-за
неточной установки номиналов в схему генератора ТИ, из-за временного и
теплового ухода параметров радиоэлементов.
, создаваемая генератором тактовых
импульсов из-за нестабильности его частоты, которая может возникать из-за
неточной установки номиналов в схему генератора ТИ, из-за временного и
теплового ухода параметров радиоэлементов.
б) отсутствие синхронизации частоты
измеряемого сигнала с опорной частотой генератора тактовых импульсов.
Погрешность может достигать ![]() кванта времени
кванта времени ![]() .
.
в) погрешность преобразования непрерывного сигнала в импульсный в УФ.
Учитывая вышесказанное, напишем формулу
измеряемой частоты:  , где
, где ![]() ,
, ![]() –
абсолютная и относительная погрешности цифрового частотомера в целом, N –
число импульсов, начитанных цифровым счетчиком. Учитывая малость
–
абсолютная и относительная погрешности цифрового частотомера в целом, N –
число импульсов, начитанных цифровым счетчиком. Учитывая малость ![]() и N>>1,
получим:
и N>>1,
получим:  (3). В выражении (3) первое
слагаемое является мультипликативной, а вторая аддитивной погрешностью.
(3). В выражении (3) первое
слагаемое является мультипликативной, а вторая аддитивной погрешностью.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.