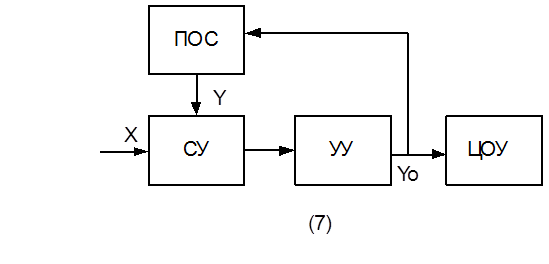
Следящее уравновешивание.
При нём величина Х постоянно сравнивается с компенсирующей величиной У и при наличии разности (У-Х) устройство управляется УУ через преобразователь обратной связи ПОС изменяет У в функции времени до тех пор, пока не будет достигнута заданная точность их установившегося равенства, после чего производится цифровой отсчет. Если измеряемая величина Х постоянна во времени, то преимущества следующего уравновешивания перед развертывающим очевидно. После первого отсчета при следящем уравновешивании состояния узлов отсчета не изменяется.
Если же измеряемая величина Х изменяется во времени, то другим существенным преимуществом следящего уравновешивания является меньшая динамическая погрешность.
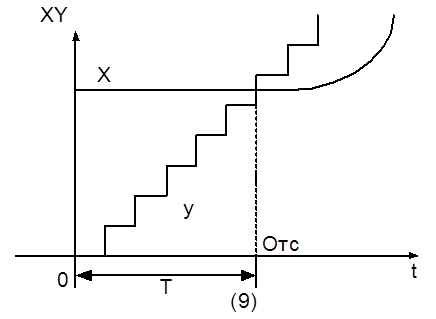
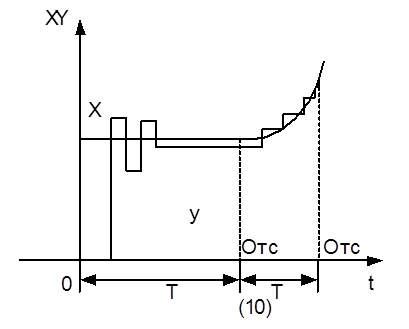
На рис. (9) изображена динамическая погрешность при развертывающем уравновешивании. На рис. (10) изображена динамическая погрешность при следящем уравновешивании. На графиках: Отс – моменты отсчета; Т – цикл отсчета.
При следящем уравновешивании (10) с изменением входной величины Х в каждый момент отсчета динамической погрешности не будет при условии, что скорость изменения Х меньше максимальной скорости изменения компенсирующей величины У.
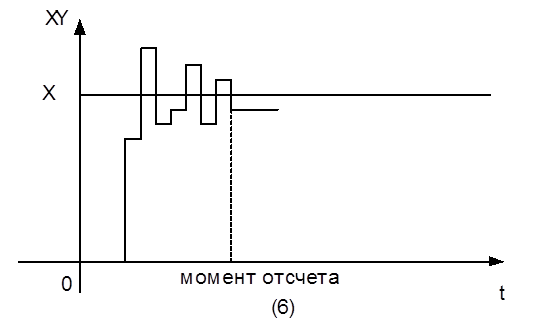
В ряде случаев следящее уравновешивание без периода отсчета (см. рис. (8)) создает сложности при регистрации непрерывных процессов, так как не дает координаты времени. Этот недостаток легко устраняется введением периода отсчета (рис. (10)).
ЦСИ уравновешивающего преобразования в основном применяется для измерения электрических величин (R, U, I и т. д.), так как большинство других величин легко преобразуются в электрические.
Лекция 5
Развертывающий метод имеет следующие свойства: его вход избыточный это значит что даже если измеряемая величина X не изменяется то цифровой сигнал измеряется таким прибором после каждого цикла измерения Т будет выдавать значение величины X. Таким образом мы получаем некоторую избыточную информацию.
Прибор основан на следящем методе имеет следующую особенность: кратковременные изменения измеряемого сигнала X прибор следящего типа отметит и изменит свои показания, если изменение сигнала X меньше половины периода развертывания прибора развертывающего типа, то большая вероятность того что прибор развертывающего типа этот сигнал не отследит.
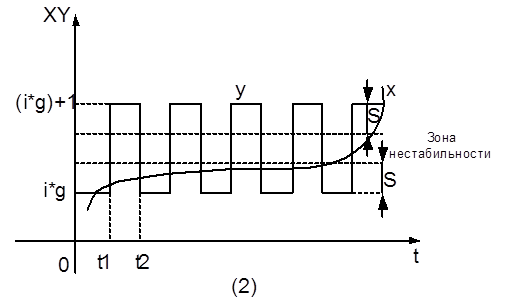
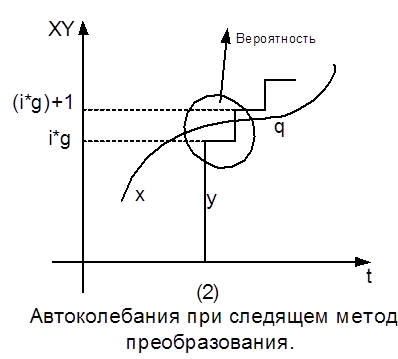
В приборах следящего типа вполне возможны
автоколебания. При условии, если  , то при медленно
изменяющемся сигнале в момент времени X
станет больше опорного напряжения Uoi и
прибор перейдет к следящему состоянию. Но поскольку в момент времени t2
сигнал X не приблизился к следующему
стабильному состоянию прибора Uo(i+1) на
величину S, то прибор опять перейдет в
состояние Uoi. Подобный
автоколебания будут продолжаться до тех пор, пока измеряемый сигнал X не
выйдет из зоны нестабильности.
, то при медленно
изменяющемся сигнале в момент времени X
станет больше опорного напряжения Uoi и
прибор перейдет к следящему состоянию. Но поскольку в момент времени t2
сигнал X не приблизился к следующему
стабильному состоянию прибора Uo(i+1) на
величину S, то прибор опять перейдет в
состояние Uoi. Подобный
автоколебания будут продолжаться до тех пор, пока измеряемый сигнал X не
выйдет из зоны нестабильности.
Следует отметить, что S величина нестабильности.
Бороться с автоколебаниями не отображая младший разряд числа нельзя.
 Другой
метод борьбы с автоколебаниями значительное увеличение порога чувствительности S.
Учитывая его нестабильность S e (q¸2q) S как
правило задают от 1 до 2 квантов измерений . В таком случае младший разряд
измерения становится недостоверным но как правило идут на такие жертвы. Еще
одним недостатком следящего метода измерения является отсутствие стабильных
периодов отсчета для последующей обработки. Поэтому обработка измеряемого
сигнала X происходит в следящем
режиме, а индикация в циклическом.
Другой
метод борьбы с автоколебаниями значительное увеличение порога чувствительности S.
Учитывая его нестабильность S e (q¸2q) S как
правило задают от 1 до 2 квантов измерений . В таком случае младший разряд
измерения становится недостоверным но как правило идут на такие жертвы. Еще
одним недостатком следящего метода измерения является отсутствие стабильных
периодов отсчета для последующей обработки. Поэтому обработка измеряемого
сигнала X происходит в следящем
режиме, а индикация в циклическом.
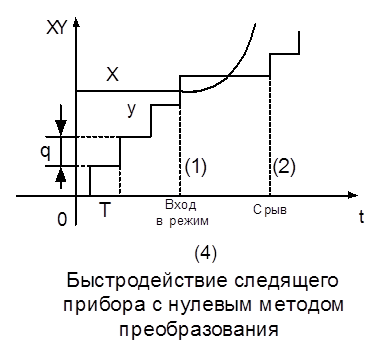
Оценка быстродействия развертывающего и следящего метода.
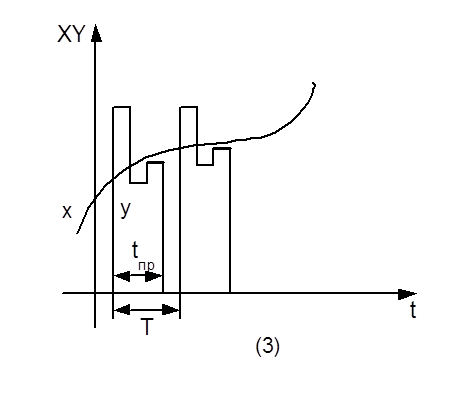
Временная диаграмма развертывающего прибора с последовательным методом преобразования.
Оценка быстродействия развертывающего прибора проста и основывается на оценки величины периода развертывания Т при желании для достижения максимального быстродействия период Т выбирают несколько большим времени преобразования tпр на время необходимое на подготовку прибора к следующему циклу. Для приборов следящего типа подобная оценка не принимаема для этого используются следующие два показателя:
1) Время необходимое для отслеживания ступенчатого сигнала.
2) Допустимая скорость изменения входного сигнала без срыва слежения.
 По первому критерию следящий метод, как правило, хуже
развертывающего.
По первому критерию следящий метод, как правило, хуже
развертывающего.
Второй критерий математически описывается так:
Временные достоинства обоих методов можно комбинировать в одном приборе, объединив в нем оба метода преобразования. В таком случае при ступенчатом изменении входного сигнала приборработает в развертывающем режиме, а при плавном изменении в следящем. Таким образом, дотсигается болеее высокая степень адаптации к измеряемому сигналу.
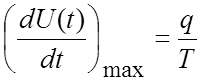
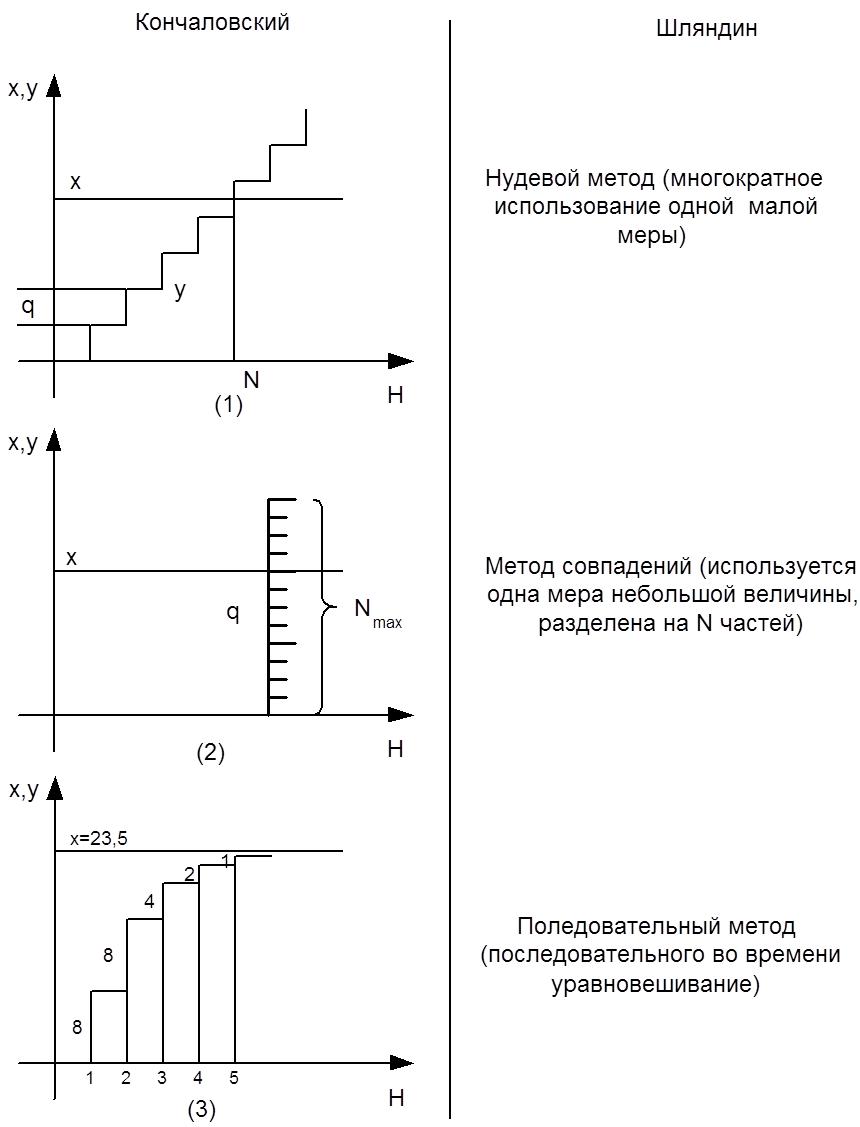
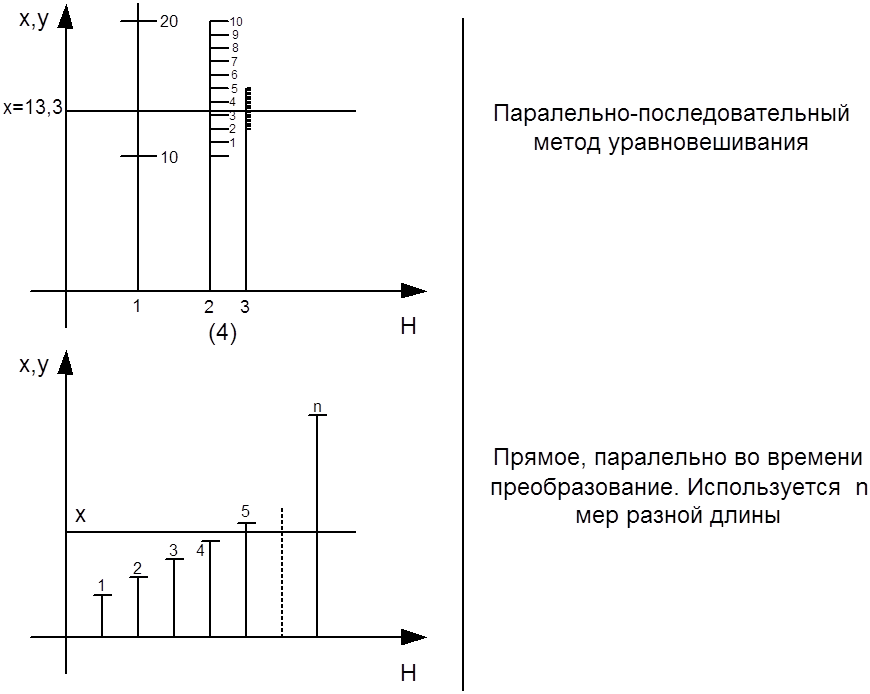
Сводная таблица методов преобразования непрерывных величин в цифровой код.
Лекция 6
Сравнение аналоговых и цифровых измерительных средств.
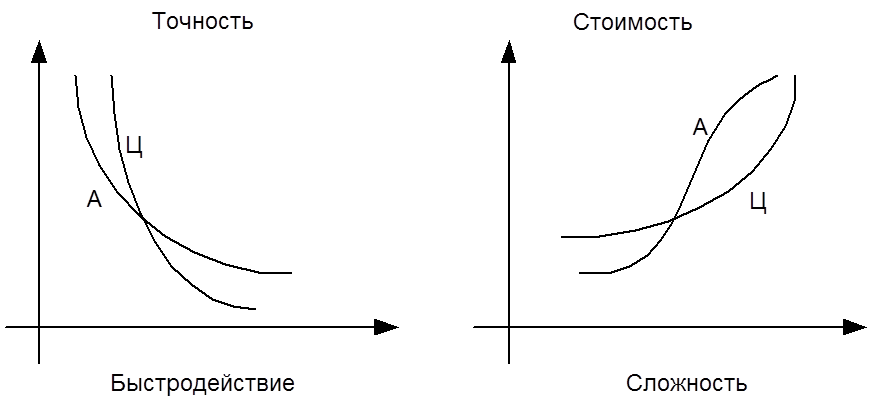
Каждая точка на данном графике – это отдельный прибор – аналоговый или цифровой. Как видно на рис. (1), аналоговые приборы с максимальным быстродействием являются значительно точнее цифровых. Как видно из рис. (2), имея одинаковую высокую сложность, цифровые приборы являются дешевле аналоговых.
Основные технические характеристики ЦСИ.
Наиболее важными техническими характеристиками ЦСИ являются:
– цена деления;
– входное сопротивления;
– быстродействие;
– помехоустойчивость;
– надёжность;
– точность;
– среднеквадратичные и информационные показатели.
Цена деления.
Цена деления шкалы – это, как известно, разность между двумя соседними величинами, отображаемых шкалой. Цену деления ЦСИ можно отобразить так:
 ,
,
где Xmax – максимальное значение предела измерений, m – количество десятичных разрядов индикации.
Для каждого предела измерений цена деления постоянна и определяет минимально возможную для данного ЦСИ разрешающую способность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.