





6.5. ИЗМЕРЕНИЕ ПЕРЕМЕЩЕНИЙ
Измерение перемещений при тепловых статических испыта- | ниях конструкций производится с целью получения прогибов,, девиаций сечений, углов закручивания конструкций, изучения коробления обшивки при нагружении и нагревании и т. д. Выбор способа измерения перемещений и технических средств его реализации в значительной мере зависит от величины перемещения, | требуемой точности измерения, программы испытания и конст-7! руктивных особенностей летательного аппарата.
В настоящее время при статических испытаниях в условиях I нормальных температур применяются различные способы измерения линейных перемещений. Большинство из них после некоторого усовершенствования может быть применено и для измерения перемещения при проведении тепловых статических испытаний. Однако как универсальное средство для исследования деформированного состояния конструкций в широком диапазоне*,-температур следует рекомендовать дистанционные датчики^ линейных перемещений и фотометрический метод измерения.
Датчики линейных перемещений устанавливаются или непосредственно вблизи от конструкции и находятся в условиях, аналогичных условиям работы испытываемой конструкции, или выносятся на некоторое расстояние от нее и не подвергаются воздействию высоких температур. Первый способ установка датчиков применяется при измерении малых перемещений с повышенной точностью при испытаниях элементов конструкций, определении девиаций опор при поагрегатных испытаниях, измерении перемещений отдельных узлов внутри конструкции и т. д. В случае применения второго способа установки механическая связь между конструкцией и датчиками осуществляется при помощи соединительных элементов, на описании которых остановимся ниже. Создание универсального датчика, обеспечивающего-высокую точность и надежность измерений в диапазоне перемещений 0—1000 мм, трудно осуществимо. Поэтому разработай! ряд дистанционных датчиков на более узкие диапазоны измерения. В табл. 6.6 приведены некоторые характеристики дистанционных датчиков перемещения.
В качестве преобразователей неэлектрической величины перемещения в электрический сигнал в датчиках с диапазоном измерения до 200 мм используются прецизионные тензорезисторы, к датчиках перемещения с диапазоном измерения до 1000 мм и: выше — проволочные реостаты. Основным элементом датчика линейного перемещения с ходом до 200 мм является механический преобразователь с упругим чувствительным элементом, на который наклеен тензорезистор. В зависимости от величины перемещения и требуемой точности измерений применяются механические преобразователи различных схем.
|
Таблица 6.6 |
|||
|
Тип датчика |
Диапазон перемещения, ММ |
Рабочая температура, К |
Примечание |
|
вди-ю |
0—10 |
290 ±15 |
Визуальный и дистанционный |
|
ДППТ-10 |
0—10 |
290 ±15 |
|
|
вдп-ю |
0—10 |
290—1300 |
С системой охлаждения |
|
ДП-25 |
0—25 |
2S0±15 |
|
|
ДП-50 |
Q—50 |
290 ±15 |
|
|
ДП-100 |
0—100 |
290 ±15 |
|
|
ДП-200 |
0—200 |
290 ±15 |
|
|
ВДП-200 |
0—200 |
290—570 |
С системой охлаждения |
|
ДИП-1000 |
0—1000 |
290±15 |
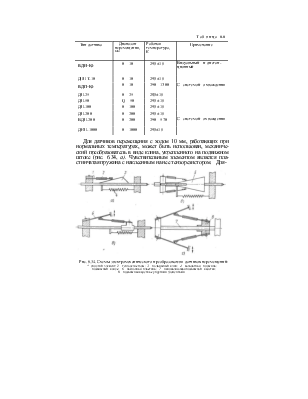
Для датчиков перемещения с ходом 10 мм, работающих при нормальных температурах, может быть использован, механический преобразователь в виде клина, укрепленного на подвижном штоке (рис. 6.34, а). Чувствительным элементом является пластинчатая пружина с наклеенным на нее тензорезистором. Для-
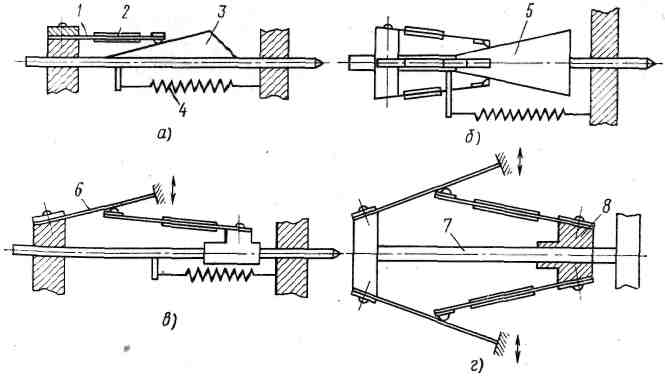
Рис. 6.34. Схемы электромеханического преобразователя датчиков перемещений:
* упругий элемент; 2—тензорезисторы; 3—подвижный клин; 4—возвратная пружина;
—подвижный конус; 6—наклонная пластина; 7—направляющая подвижной каретки;
8—подвижная каретка с упругими элементами
обеспечения высокой точности измерений клин должен быть строго ориентирован по направлению перемещений, поперечные люфты в подвижном соединении не допускаются. Повышенные требования к точности изготовления и сложность наладки следует отнести к недостаткам датчиков перемещений с клиновым механическим преобразователем. Значительно проще в изготовлении и эксплуатации датчик перемещений с механическим преобразователем в виде конуса (рис. 6.34, б). Установка четырех чувствительных элементов по периметру сечения конуса позволяет повысить выходной сигнал датчика и соответствующим подключением тензорезисторов к регистрирующему прибору исключить погрешности измерения, возникающие из-за радиальных люфтов в подшипниках скольжения. Конические преобразователи особенно удобны в конструкциях датчиков перемещений, работающих в условиях повышенных температур, для которых во избежание заклинивания подвижного штока в подшипниках скольжения приходится допускать повышенные радиальные зазоры.
В конструкциях датчиков линейных перемещений с ходом 50— 200 мм рационально применять схемы механических преобразователей, показанные на рис. 6.34, в, г. Основным достоинством их является простота изготовления наклонной пластины, заменяющей подвижный клин, возможность регулировки чувствительности прибора в процессе его наладки путем изменения угла наклона пластины. Механические преобразователи, показанные на рис. 6.34, имеют нелинейную зависимость. Для некоторых типов датчиков погрешность измерений, вызванная нелинейностью, может достичь 1%. Эту погрешность можно снизить, применяя наклонные поверхности переменной кривизны, закон изменения кривизны подбирается экспериментально при градуировке. Механические преобразователи с наклонными пластинами позволяют наиболее просто осуществить линеаризацию измерительной характеристики.
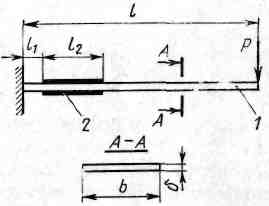
Упругий элемент датчика перемещений выполняется в виде плоской пружины из листовой стали У8А толщиной 0,2—0,25 мм, на поверхность которой наклеивается тензорезистор 1-П. В связи с тем, что толщина упругого элемента соизмерима с толщиной диэлектрической основы тензорезистора, при расчете относительной деформации еп проволоки чувствительной решетки необходимо принимать действительное расстояние ее от нейтральной оси
В
+ 28к + dn
S" = £----- 1-- '
где е — относительная деформация на поверхности чувствительного элемента;
6 — толщина упругого элемента;
бк — толщина диэлектрической основы (подложки и клея);
d-a— диаметр проволоки чувствительной решетки.
Зная геометрические размеры тензорезистора и место его расположения на упругом элементе, можно определить среднюю относительную деформацию чувствительной решетки (рис. 6.35)
;,+;.
Г zydy
8 -JJ
fccp —
h
|
|
Для увеличения выходного сигнала и температурной компенсации измерительного моста тензорезисторы целесообразно наклеивать на упругом элементе в растянутой и сжатой зоне друг под другом. Величина выходного сигнала датчика перемещения &.U, включенного в измерительный мост, может быть определена по формуле
'it1*
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.