При применении в качестве соединительного элемента струнь» появляется дополнительная погрешность, обусловленная изменением силы натяжения в процессе испытаний. Даже небольшие изменения силы натяжения могут привести к существенным изменениям струны. Особенно большие ошибки возможны при наличии участков струны с изгибами. Увеличение силы предварительного натяжения струны ведет к уменьшению погрешности, но слишком сильно увеличивать натяжение нельзя, так как большая часть струны находится в зоне нагревания и при высоких напряжениях могут возникнуть деформации ползучести и, следовательно, дополнительные ошибки в измерениях.
Простым и надежным способом измерения больших перемещений при статических испытаниях летательных аппаратов в тепловых камерах и трубах является фотометрический метод [43].
|
|
Сущность этого метода состоит в следующем. На поверхности испытываемой конструкции в точках, перемещения которых необходимо измерять, устанавливаются специальные масштабные столбики (рис. 6.41), которые во время эксперимента фотографируются. Сравнивая истинные размеры столбиков с их изображениями и перемещениями на негативе, можно определить перемещения конструкции в исследуемых точках. При этом методе для фотосъемки целесообразно использовать аэрофотоаппараты с дистанционным управлением.
В качестве примера приведем описание технологии измерения перемещений конструкции при испытаниях в тепловой камере. Масштабные столбики крепятся на конструкции, как показано на рис. 6.42, а фотоаппарат устанавливается на расстоянии 3—5 м от точек измерения так, чтобы его оптическая ось была
Рис. 6.41. Масштабный столбик
перпендикулярна продольной оси столбиков. Освещение столбиков и конструкции производится через смотровые окна камеры. Конструкция фотографируется до начала испытаний (нулевой отсчет) и при ее нагружекии и нагревании. Расшифровка нега-
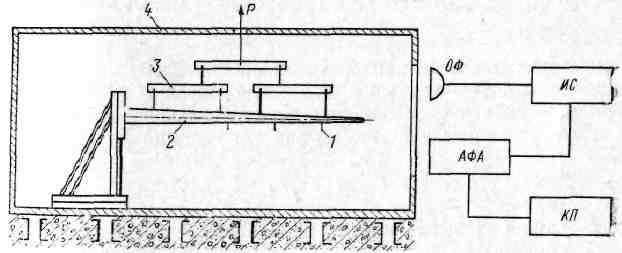
Рис. 6.42. Блок-схема системы измерения перемещений в термокамере фотограмметрическим методом:
'—масштабный столбик; 2— конструкция; 3—система нагружения; 4—термокамера;. АФА—аэрофотоаппарат; ИС—источник литания; ОФ—осветительная фара; КП—
командный аппарат
0
тивов производится с помощью универсального измерительного» микроскопа УИМ-23. Величина перемещений определяется па формуле
f- a"
где q„ — перемещение перекрестия столбика «п» на негативе;
Мп — масштаб съемки; Мп=~-;
/ — расстояние между перекрестиями на масштабном стол-» бике; тп — расстояние между изображениями перекрестий на не*|
гативе. Данный метод был применен для измерения перемещений при-; -температурах до 773 К в диапазоне 0—100 мм и имеет точность':
±(2-2,5)%.
|
|
При статических испытаниях' конструкций измерение угловых перемещений производится специальными угломерами или.
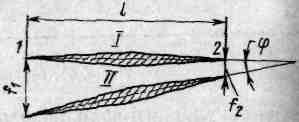
Рис. 6.43. Конструктивная схема маятникорого угломера:
/—штанга; 2—шток; 5—груз; 4—датчик перемещений; 5—струна; 6— конструкция
Рис. 6.44. Определение угла поворота сечения конструкции по показаниям датчиков перемещений:
/—положение конструкции до нагруже-
ния; //-^положение конструкции при
нагружении
вычисляются по показаниям датчиков линейных перемещений. Маятниковый угломер (рис. 6.43) состоит из дистанционного; .датчика линейных перемещений, горизонтальной рейки и штанги «с грузом. Угловое перемещение определяется по формуле
ч-т- 1
где / — линейное перемещение, определяемое по показаниям дат-: чика;
I—измерительная база угломера.
Точность измерения маятникового угломера зависит от точности измерения линейного перемещения и величины выбранной измерительной базы. Например, при базе угломера /=100 мм к точности датчика линейных перемещений 0,01 мм возможно определение углового перемещения с точностью МО-4 рад.
По показаниям двух датчиков линейных перемещений угол поворота определяется по формуле
. ,.,;/гА ср—т~ ,
где fi— перемещение в точке 1 (рис. 6.44); /2 —■ перемещение в точке 2; I—расстояние между точками / и 2. Предельная относительная погрешность измерения при этом будет равна
§?= ±— ,
/1— /2
где А/ — предельная погрешность измерения перемещения.
Если в знаменатель входит разность близких величин, относительная погрешность измерения угловых перемещений может

Рис. 6.45. Электроиндуктивный уровень
быть большой. Поэтому для увеличения точности измерения угловых перемещений по данному способу необходимо увеличивать точность измерения линейных перемещений и разность ft—/2 за счет увеличения базы измерения между точками 1 и 2.
Для измерения угловых перемещений при нормальных температурах и нагружении конструкции ступенями могут быть рекомендованы электроиндуктивные уровни модели 129* и оптические квадранты типа КО-1М.
Электроиндуктивный уровень (рис. 6.45) служит для контроля и измерения углов наклона конструкции в горизонтальной плоскости. Он обеспечивает абсолютное измерение угловых перемещений в диапазоне 0—3° по механическому барабану и относительное измерение в диапазоне ±8' с дистанционной передачей информации. Уровень состоит из следующих основных элементов: датчика, усилителя, генератора, показывающего прибора. Принцип действия уровня основан на преобразовании уг-
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.