Розряд 2 - CPHA. Фаза синхронізації. Значення біта фази синхронізації (CPHA) визначає по якому фронту SCK відбувається вибірка даних. У таблиці 49 узагальнена дія біта CPHA.
Таблиця 49 - Результат дії біта CPHA
|
CPHA |
Передній фронт |
Задній фронт |
|
0 |
Вибірка |
Установлення |
|
1 |
Установлення |
Вибірка |
Комбінація бітів CPHA й CPOL задає чотири можливих режими послідовної передачі даних.
Біти даних виводяться зсуванням і фіксуються на вході протилежними фронтами синхросигналу SCK, тим самим гарантуючи достатній час на встановлення сигналів даних.
Розряди 1, 0 - SPR1, SPR0. Біти вибору частоти синхронізації SPI. Дані біти задають частоту синхронізації на виводі SCK у режимі майстра. SPR1 і SPR0 ніяк не впливають в режимі підпорядкованого. Зв'язок між змістом бітів SPR1, SPR0 і частотою SCK представлений у таблиці 50.
Таблиця 50 - Зв'язок між умістом бітівSPR1, SPR0 і частотою SCK
|
SPI2X |
SPR1 |
SPR0 |
Частота SCK |
|
0 |
0 |
0 |
fosc /4 |
|
0 |
0 |
1 |
fosc /16 |
|
0 |
1 |
0 |
fosc /64 |
|
0 |
1 |
1 |
fosc /128 |
|
1 |
0 |
0 |
fosc /2 |
|
1 |
0 |
1 |
fosc /8 |
|
1 |
1 |
0 |
fosc /32 |
|
1 |
1 |
1 |
fosc /64 |
Призначення бітів регістра статусу SPSR представлені в таблиці 51.
Таблиця 51 - Призначення бітів регістра статусу SPSR
|
№ біта |
Ім'я |
Призначення |
|
7 |
SPIF |
Прапорець переривання по SPI |
|
6 |
WCOL |
Прапорець повторного записування |
|
5 – 1 |
– |
Зарезервовані біти |
|
0 |
SPI2X |
Вибір частоти синхронізації SPI біт 0 |
Розряд 7 - SPIF. Прапорець переривання по SPI. Прапорець SPIF установлюється після завершення послідовної передачі. Переривання генерується в тому випадку, якщо встановлено біт SPIE у регістрі SPCR і дозволені загальні переривання. Якщо SS настроєний як вхід і до нього прикладений низький рівень, то, якщо SPI перебував у режимі майстра, також установиться прапорець SPIF.
Розряд 6 - WCOL. Прапорець повторного записування. Біт WCOL установлюється, якщо виконано записування до регістру даних SPI (SPDR) під час передачі даних.
Розряди 5..1 - Res. Зарезервовані біти.
Розряд 0 - SPI2X. Біт подвоєння швидкості SPI. Якщо в даний біт записати лог. 1, то швидкість роботи SPI (частота SCK) подвоїться, якщо SPI перебуває в режимі майстра.
Регістр даних SPI має доступ на зчитування і записування і призначений для обміну даними між файлом регістрів (r0...r31) і зсувним регістром SPI. Записування до даного регістру ініціює передачу даних. Під час зчитування даного регістра фактично зчитується вміст приймального буфера зсувного регістра. Структура регістра даних SPI - SPDR наведена в таблиці 52.
Таблиця 52 - Регістр даних SPI – SPDR
|
Розряд |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
Ст. розряд |
Мол. розряд |
SPDR |
|||||||
|
Зчитування/ записування |
Зч. / Зп |
Зч. / Зп |
Зч. / Зп |
Зч. / Зп |
Зч. / Зп |
Зч./ Зп |
Зч./ Зп |
Зч. / Зп |
|
|
Вих. значення |
x |
x |
x |
x |
x |
x |
x |
x |
Приклад конфігурації послідовного периферійного інтерфейсу - SPI мікроконтролера ATmega128
Настроїти послідовний периферійний інтерфейс на передачу п'яти байт даних у режимі майстер.
1. Запишемо стан регістра керування SPCR за заданої умови.
Регістр керування SPCR буде мати наступний варіант установок згідно таблиці 53: дозвіл переривання SPI, запуск, порядок зсування даних убік молодших розрядів, режим ведучого, SCK має низький рівень у стані очікування, вибірка даних по задньому фронту.
Таблиця 53 - Варіант установок регістра керування SPI – SPCR
|
SPIE |
SPE |
DORD |
MSTR |
CPOL |
CPOL |
SPR1 |
SPR0 |
|
1 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
2. Запишемо стан регістра статусу SPSR.
У регістрі статусу встановимо біт подвоєння швидкості передачі в стан логічного 0, що значитиме нормальну швидкість передачі згідно таблиці 54.
Таблиця 54 - Регістр статусу SPSR
|
SPIF |
WCOL |
SPI2X |
|
– |
– |
0 |
Програма
void InitPorts(void);
void InitADC(void);
void InitSPI(void);
int adch, adcl,i;
void InitPorts(void)
{ DDRF=0x00;
DDRB=0x07;
}
void InitADC(void)
{ADMUX=0x40;
ADCSRA=0xfd;
}
void InitSPI(void)
{SPCR=0xdb;
SPDR=adch;
}
SIGNAL(SIG_ADC)
{adch=ADCH;
adcl=ADCL;
}
SIGNAL(SIG_SPI)
{ cli();
switch (i)
{case 0:
SPDR=adch;
i=1;
break;
case 1:
SPDR=adcl;
i=0;
break;
}
sei();
}
void main (void)
{ InitPorts();
InitADC();
InitSPI();
sei();
while(1){}
}
V PF0 VSS SLIDER_1(0 5) ;x: Panel sliders 1 - 3
.PLOT V(PB0) V(PB1) V(PB2)
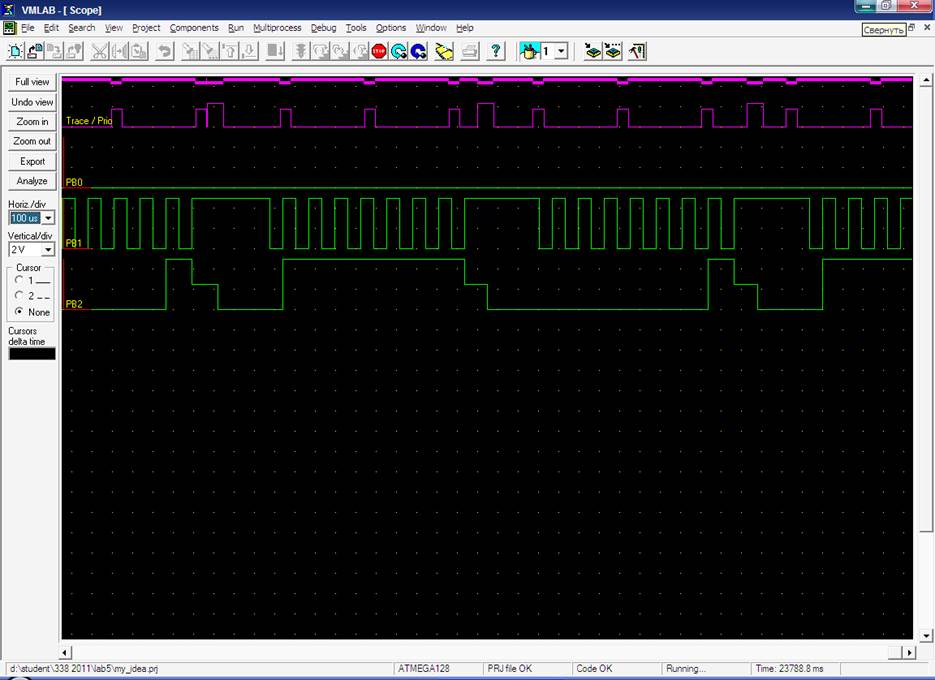
Висновок: на цій лабораторній роботі ядослідила принцип побудови, освоїла методику конфігурації й особливості застосування послідовного периферійного інтерфейсу - SPI мікроконтролера ATmega128
Лабораторна робота № 6
Дослідження і конфігурація керованого синхронно-асинхронного послідовного приймача-передавача мікроконтролера ATmega128
Мета роботи: дослідити принцип побудови, освоїти методику конфігурації й особливості застосування синхронно-асинхронного послідовного приймача-передавача мікроконтролера ATmega128
Завдання до лабораторної роботи
2 варіант
Передати масив із семи 6-розрядних слів. У структуру посилки включити перевірку паритету на непарність і два стоп-біти.
Теоретичні основи
Універсальний синхронно-асинхронний послідовний приймач-передавач (УСАПП, USART) призначений для організації гнучкого послідовного зв'язку між двома або декількома мікроконтролерами.
Відмінні риси:
- повнодуплексна робота (окремі регістри прийому й
передачі);
- асинхронна або синхронна робота;
- ведуче або підпорядковане тактування зв'язку в
синхронному режимі роботи;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.