σ
 t
t
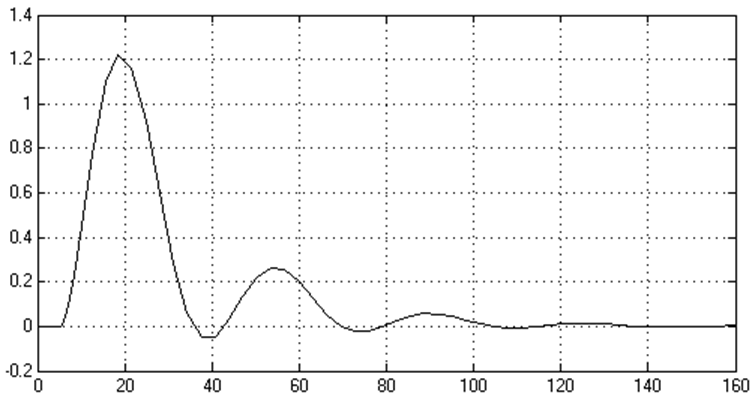
Рисунок 2.6 - График процесса регулирования САР (точка 5)
σ
 t
t
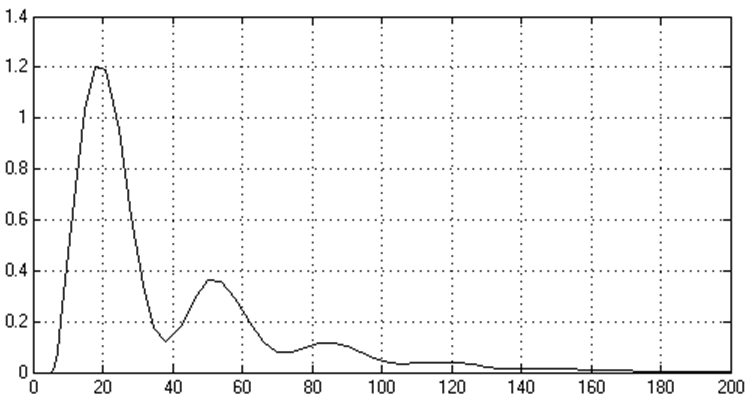
Рисунок 2.7 - График процесса регулирования САР (точка 6)
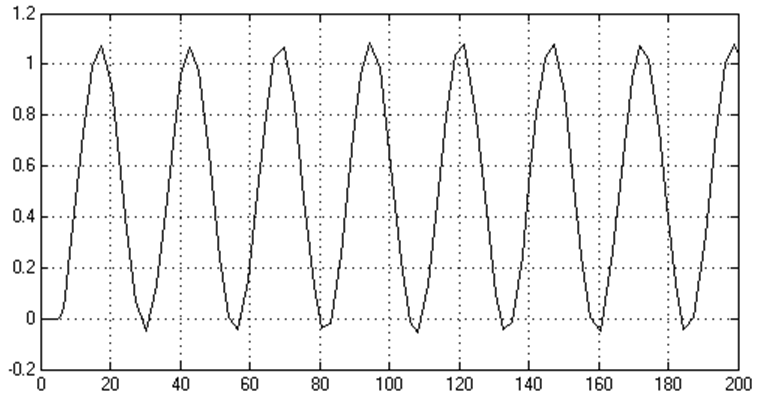
2.2 Расчет параметров настройки ПИД-регулятора методом незатухающих колебаний
В соответствии с этим методом, расчёт настроек ПИД-регулятора проводится в два этапа:
1)
расчёт критической настройки пропорциональной
составляющей ![]()
(C0 = С2 =
0), при которой АСР будет находится на границе устойчивости, и соответствующее
ей ![]() :
:
 ; (2.9)
; (2.9)
2)
определение по ![]() и
и
![]() оптимальных настроек (
оптимальных настроек (![]() ,
,![]() ,
,![]() ) регулятора, обеспечивающих степень
затухания
) регулятора, обеспечивающих степень
затухания ![]() .
.
Так
как интегрирующая и дифференциальная составляющие из условия расчёта равны нулю
(C0 =
С2 = 0), следовательно, при помощи пакета MATLAB подбираем пропорциональную составляющую ![]() .
.
σ
 t
tИз рисунка 2.8 видно, что период автоколебаний, при котором АСР находится на границе устойчивости, равен: T = 24 мин.
 рад/мин.
рад/мин.
Оптимальные настройки ПИД-регулятора находим по следующим формулам:
![]() ;
; ![]() ;
; ![]() . (2.10)
. (2.10)
![]() ;
;
![]() ;
;
![]() .
.
σ
 t
t
3 Анализ качества настройки ПИ-регулятора
Анализ
процессов, соответствующих различным значениям С0 и С1,
лежащим на кривой равной степени затухания (рисунок 2.1), показывает, что
качество переходного процесса при заданной степени затухания ![]() изменяется в зависимости от
выбранных значений С0 и С1.
изменяется в зависимости от
выбранных значений С0 и С1.
Оптимальный переходный процесс должен удовлетворять следующим критериям качества:
- затухание переходного процесса должно быть интенсивным (Y=0,75¸0,9);
- максимальное отклонение регулируемой величины должно быть наименьшим (ymax=min);
- продолжительность переходного процесса должно быть минимальным
(tp=min);
- интегральный квадратичный критерий  должен быть минимальным;
должен быть минимальным;
Таблица 3.1 – Критерии качества для выбранных точек кривой равной степени затухания ПИ-регулятора
|
Параметры точки кривой равной степени затухания |
Степень затухания, Y |
Максимальное отклонение, ymax |
Время регулирования, tp |
Интегральный квадратичный критерий, |
|
Точка 1 w=0.0560 С0=0.0102 С1=-0.0591 Рисунок 2.2 |
0,75 |
2,058 |
410 |
0,5148 |
|
Точка 2 w= 0.0860 С0=0.0200 С1=0.0502 Рисунок 2.3 |
0,75 |
1,569 |
286 |
0,3185 |
|
Точка 3 w=0.1320 С0=0.03 С1=0.2197 Рисунок 2.4 |
0,75 |
1,307 |
205 |
0,2183 |
|
Точка 4 w= 0.1710 С0=0.0252 С1=0.3374 Рисунок 2.5 |
0,75 |
1,236 |
142 |
0,1816 |
|
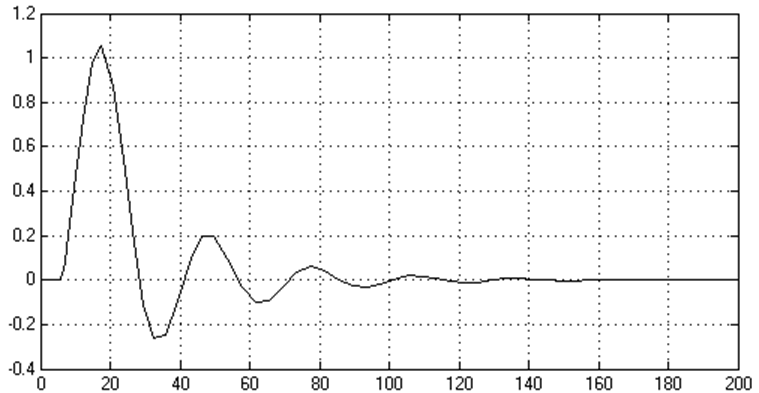
Точка 5 w= 0.1830 С0=0.0201 С1=0.3649 Рисунок 2.6 |
0,75 |
1,226 |
134 |
0,1813 |
|
Точка 6 w= 0.1920 С0=0.0150 С1=0.3823 Рисунок 2.7 |
0,75 |
1,223 |
172 |
0,1893 |
*-Значения интегрального квадратичного критерия получены с помощью пакета
Matlab
Из
таблицы 3.1 видим, что наилучшими критериями качества процесс обладает при
настройках ПИ-регулятора соответствующих точке 5 на кривой равной степени затухания,
т.е. интегральный квадратичный критерий имеет наименьшее значение (![]() ), и минимальное значение времени
регулирования (
), и минимальное значение времени
регулирования (![]() ),а так же сравнительно не
большое максимальное отклонение (
),а так же сравнительно не
большое максимальное отклонение (![]() ).
).
Так если двигаться по кривой от меньших значений частоты к большей (таблица 2.1), то амплитуды колебаний регулируемой величины уменьшаются (рисунки 2.2, 2.3, 2.4, 2.5, 2.6, 2.7), однако по мере приближения к оси абсцисс процесс затягивается, а при значении С0 лежащем на оси абсцисс он характеризуется наименьшим отклонением регулируемой величины и остаточной неравномерностью.
Многочисленные промышленные опыты настройки регуляторов показывают, что следует выбирать С0 и С1 (рисунок 2.6) лежащие несколько правее максимума кривой заданного затухания (точка 5 рисунок 2.1).
В данной курсовой работе наиболее благоприятными переходным процессом являются процесс при следующих настройках ПИ-регулятора:
для ПИ-регулятора С0 = 0,0201 и С1 = 0,3649.
Заключение
В соответствии с заданием на курсовое проектирование по кривой разгона определены динамические характеристики объекта регулирования (передаточная функция, переходная характеристика, весовая характеристика, ЛАЧХ, ЛФЧХ, АФЧХ, расположение на комплексной плоскости нулей и единиц).
В данной курсовой работе наиболее благоприятными переходными процессами являются процессы при следующих настройках регуляторов:
для ПИ-регулятора С0 = 0,0201 и С1 = 0,3649;
для ПИД-регулятора С1 = 0,4601604 , С0 = 0,0385504 и С2 = 1,379778.
1. Филин В.А. Расчёт локальных систем автоматического управления: Учебное пособие для студентов специальности 0639. Красноярск, КГУ: 1981,99с.
2. Автоматическое управление в химической промышленности: Учебник для вузов. Под ред. Е.Г. Дудникова. – М.: Химия, 1987. – 368 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.