2 - второго порядка, динамика которого описывается дифференциальным уравнением более высокого порядка.
Под емкостью подразумевается способность накапливать вещество или энергию. Чем больше емкость, тем медленнее изменяется регулируемая величина, тем больше инерционность объекта. Кривая разгона типа”2” - многоемкостная - может быть представлена одноемкостной моделью (касательной) с соответствующими k2 и T2, но сдвинутую по времени на величину емкостного запаздывания tе . Наличие транспортеров, трубопроводов, норий обусловливает транспортное запаздывание tт . Полное запаздывание ОУ:
t = tт + tе .
Динамический режим статического ОУ с запаздыванием по каналу регулирования описывается дифференциальным уравнением:
T2 dy(t) / dt + y(t) = k2 x(t - t).
Статическим ОУ характерно после окончания переходного процесса состояние равновесия на новом уровне - происходит самовыравнивание.
В астатическом ОУ равновесие не устанавливается. Скорость изменения выходной величины пропорциональна отклонению входной:
t
y(t) = ( 1/q ) ò x(t) dt,
o
где q - постоянная времени астатического ОУ.
 |
|||
 Y
3 4
Y
3 4
 |
dy / dt = const
![]()
![]()
![]()
![]()
![]() a t
a t
tт te
![]()
![]() t
t
![]()
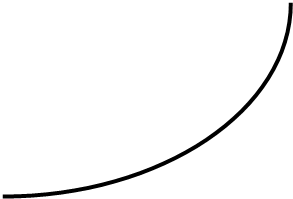
Рис. Кривые разгона астатических ОУ с транспортным и емкостным запаздываниями (3 - неустойчивого ОУ, 4 - нейтрального ОУ).
Угол наклона a (касательной) : tg a = x / q.
Динамический режим астатического ОУ может быть описан дифференциальным уравнением :
q dy(t) / dt = x(t - t) .
Дифференциальные уравнения трудны для решения. Для упрощения синтеза модели используют преобразование Лапласа, состоящее в замене функций времени y(t) на их изображения: ¥
`y(р) = p ò y(t) e-pt dt,
o
где p = d /dt - оператор Лапласа.
Операции дифференцирования и интегрирования функции времени при ненулевых начальных условиях заменяются соответственно на деление и умножение на оператор Лапласа. Дифференциальное уравнение линейной системы в общем виде:
Tn dny/dtn + Tn-1 dn-1y/dtn-1 +.. + T2 d2y/dt2 + T1 dy/dt + T0 y =
Cn dnx/dtn +...+ C2 d2x/dt2 + C1 dx/dt + C0 x.
можно заменить уравнением
(Tn pn +...+ T2 p2 + T1 p + T0) y(p) = (Cn pn +...+ C2 p2 + C1 p + C0) x(p).
Характеристикой системы служит передаточная функция, равная отношению изображения по Лапласу выходного сигнала к изображению входного сигнала. Передаточная функция системы :
W(p) = y(p) / x(p) = (Cn pn +...+ C2 p2 + C1 p + C0 ) / (Tn pn +...+ T2 p2 + T1 p + T0 ).
Преобразование Лапласа применимо для линеаризированных уравнений с постоянными коэффициентами.
АСУ состоит из множества устройств, поэтому при формировании модели сложный объект разбивается на элементарные звенья (динамические, типовые) со своими передаточными функциями. Для аналоговых устройств предпочтительнее использовать преобразование Лапласа (сложные операции интегрирования и дифференцирования заменяются на сложение и умножение). Передаточная функция системы из последовательного соединения звеньев равна произведению передаточных функций каждого звена:
x(t) y1 (t) y2 (t)
![]()
![]()
![]()
![]()
![]() W1
W2
W1
W2
W (p) = y2 (p) / x (p) = W1 (p) W2 (p),
где W1 (p) = y1 (p) / x (p) , W2 (p) = y2 (p) / y1 (p).
Передаточная функция cистемы из параллельно соединенных звеньев, на вход которых подается один и тот же сигнал, а выходные сигналы суммируются, равна сумме передаточных функций каждого звена:
y1 (t)
![]()
![]()
![]()
![]()
 W1
W1
![]()
![]()
![]() x
(t) y2 (t)
+ y (t)
x
(t) y2 (t)
+ y (t)
![]()
![]()
![]()
 W2
W2
W (p) = y (p) / е (p) = W1 (p) + W2 (p).
На вход звена, охваченного обратной связью, подается сигнал x (p). Преобразование Лапласа сигнала рассогласования е(р):
е (p) = x (p) - W2 (p) y (p).
x (p) е (p) y (p)
![]()
![]()
![]()
![]()
![]() _ X W1
_ X W1
![]()
![]() x2
(p) W2
x2
(p) W2
В соответствии с определением передаточной функции :
y (p) = W1 (p) е (p),
следовательно,
y (p) = x(p) W1(p) / ( 1 + W1(p) W2(p) ).
Передаточная функция системы с отрицательной обратной связью:
W(p) = y (p) / x (p) = W1(p) / ( 1 + W1(p) W2(p) ).
Если обратная связь положительна, то
W(p) = y (p) / x (p) = W1(p) / ( 1 - W1(p) W2(p) ).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.