Статический режим реализуется клапаном. Расход жидкости зависит от уровня Н и достаточно точно описывается выражением:
Qст = kис Ö`H ,
где kис - коэффициент, зависящий от размеров и формы отверстия истечения.
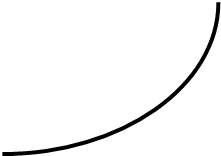
С помощью уравнения материального баланса получаем статическую характеристику ОУ (уравнение нелинейное):
Н = ( 1 / kис )2 Q2пр = ( 1 / kис )2 Q2ст .
 Н
Н ![]()
![]()
![]() Нmax
+ DH С С`
Нmax
+ DH С С`
![]()
![]() Н0
А
Н0
А
![]()
![]() Нmin
-D H D D`
Нmin
-D H D D` ![]()
a
![]() Q0 Qпр
Q0 Qпр
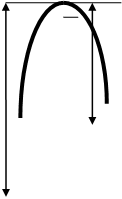
Рис. Статическая характеристика ОУ.
Для упрощения проектирования АСУ используют линеаризацию характеристики
( переход от кривой CAD к прямой C`AD` в диапазоне значений Н0 ± DH ) :
H = k Qпр = k Qст,
где k - коэффициент усиления для линеаризованного объекта (тангенс угла наклона
k = tga ).
Примером астатического ОУ может служить бак, из которого жидкость откачивается насосом с определенной скоростью. Равновесие может наступить при любом уровне. Такие ОУ рассматриваются в динамическом режиме.
При действии на вход объекта управления (ОУ) возмущения Х на его выходе появляется отклонение величины У. Протекает переходный процесс, который может быть колебательным и неколебательным (апериодическим). С течением времени амплитуда колебательного процесса может уменьшаться (затухающий переходный процесс), оставаться постоянной или увеличиваться (расходящийся процесс). Последние два процесса неустойчивы.
Переходный процесс характеризуется следующими показателями:
- у1 - максимальным динамическим отклонением регулируемой величины У,
- уост - остаточным отклонением регулируемой величины после окончания переходного процесса,
- t p - время процесса регулирования, по окончании которого отклонение регулируемой величины от установившегося значения будет меньше заданного отклонения D у .
![]()
![]() у у
у у
![]()
 |
у1 y1` (а) у1 y1` (б)
 |
|||||||
 |
 |
||||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() 2D
у 2D у
2D
у 2D у
![]()
![]() уост уост
уост уост
![]()
![]() t p
t t p
t
t p
t t p
t
Рис. Показатели качества переходного процесса: (а) - апериодического, (б) - затухающего колебательного.
Для построения математической модели используется аналитический и экспериментально-аналитический методы.
Аналитический метод описания динамического режима предусматривает синтез зависимости нарушения статического равновесия
S DH(t) = ( DQпр (t) - DQст (t) ) Dt,
где S - площадь поперечного сечения бака.
Сток жидкости из бака при небольших приращениях можно описать линеаризированным уравнением:
DQст (t) = 1/ k DH(t).
При переходе к пределу при Dt ® 0 уравнение приобретает вид:
S dDH(t) / dt + DH(t) / k = D Qпр (t).
При умножении уравнения на 1/k и введении обозначений: S k = T - постоянная времени ОУ, DH = y - регулируемая (выходная) величина, DQпр = х - регулирующее воздействие (входная величина), дифференциальное уравнение примет вид:
T dy(t) / dt + y(t) = k x(t).
Экспериментальное-аналитическое определение характеристик ОУ производят путем воздействия на находящийся в равновесии ОУ возмущения (изменения входной величины). Реакция ОУ на воздействие называется кривой разгона. С момента возмущения регулируемая величина регистрируется во времени до стабилизации ее на новом уровне для статического ОУ или до установления постоянной скорости для астатического ОУ.
![]()
![]()
![]() Х
Х
![]() x t
x t
![]()
![]() T
T
![]()
 Y
Y
1 2 yост = k x
t
![]()
![]()
![]()
![]()
![]() tе T2
tе T2
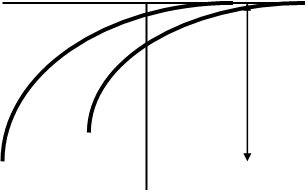
Рис. Кривые разгона статических ОУ.
С помощью кривой разгона определяются k и Т. Коэффициент усиления k по каналу регулирующего воздействия определяется из соотношения:
kx = y ост / x,
где yост - остаточное отклонение регулируемой величины от первоначального значения, х - величина скачкообразного изменения регулирующего воздействия. Чем больше коэффициент усиления k, тем чувствительнее объект к внешним воздействиям. Скорость изменения регулируемой величины в переходном процессе оценивается постоянной времени Т. Чем больше Т (чем инерционнее ОУ ), тем труднее его регулировать. Для уменьшения времени Т необходимо уменьшать емкость (размеры бака) или увеличивать нагрузку ОУ (величину стока).
Для статических ОУ кривая разгона
1 - первого порядка, или одноемкостного, динамика которого описывается дифференциальным уравнением 1-ого порядка,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.