









Министерство образования Российской Федерации
Сибирский государственный технологический университет
Пояснительная записка
( АПП 000080. ПЗ)
Руководитель:
________________ В.Н. Тяпкин
(подпись)
______________________________
(оценка, дата)
Разработал:
студент группы 24-2
________________ С. А. Левкович
(подпись)
____________________________
(дата)
Министерство образования Российской Федерации
Сибирский государственный технологический университет
на курсовой проект
Студент: Левкович С. А., группа 24-2
Дата выдачи: «___»________2001г.
Срок выполнения:_____________
Руководитель: ________________ (подпись)
1 Исходные данные: график разгонной характеристики и таблица со значениями y(t)_________________________________________________________
__________________________________________________________________
2 Перечень графического материала: Расширенная АФЧХ, график переходного процесса по приближенным формулам, график переходного процесса по методу незатухающих колебаний _____________________________________
3 Перечень вопросов, которые должны быть отражены в пояснительной записке: Определение ПФ объекта по кривой разгона; расчет параметров настройки ПИ-регулятора методом расширенной амплитудно-фазовой характеристики; расчет параметров настройки ПИ-регулятора методом незатухающих колебаний; анализ качества настройки регулятора. ______________
4 Рекомендуемая литература: Филин В.А. Расчет локальных систем автоматического управления: учебное пособие для студентов специальности 0639. Красноярск , КГУ: 1981, 99 с. ________________________________________
Руководитель:_____________
(подпись)
Задание принял к исполнению: _________
(подпись)
Курсовой проект включает в себя следующие разделы:
- Определение ПФ объекта по кривой разгона;
- Расчет параметров настройки ПИ-регулятора методом расширенной амплитудно-фазовой характеристики;
- Расчет параметров настройки ПИ-регулятора методом незатухающих колебаний;
- Анализ качества настройки регулятора.
Курсовая работа содержит: 18 листов пояснительной записки, 10 рисунков из которых 4 графика зависимости показателей надежности от времени и 1 источник литературы.
Содержание
Введение…………………………………………………………………………….6
Задание на курсовую работу…………………..……………..……………………7
1 Определение ПФ объекта по кривой разгона …………………………………..8
2 Расчет параметров настройки ПИ-регулятора методом расширенной амплитудно-фазовой характеристики …………………………………...………………..8
3 Расчет параметров настройки ПИ-регулятора методом незатухающих колебаний ………………………………………………………………………...……9
4 Анализ качества настройки регулятора………………………………………...9
Заключение...………………………………………………………………………..17
Список использованных источников……………………………………………………..18
Автоматизация является высшей, завершающей стадией механизации производства. Поэтому вопрос автоматизации технологических процессов уделяют большое внимание.
На данный момент наиболее распространенными являются системы, в которых регулирование на нижнем уровне обеспечивается универсальными промышленными регуляторами, а на верхних – с помощью ЭВМ.
1 Определение ПФ объекта по кривой разгона
Найдем точку перегиба на
кривой разгона. Имея ввиду, что шаг замеров постоянный ![]() ,
определим точку перегиба как точку в которой
,
определим точку перегиба как точку в которой ![]() .
.
57-56 =0.0404 ; 58-57 =0.0406 ;
59-58 =0.0407 ; 60-59 =0.0406 ;
61-60 =0.0407 ; 62-61 =0.0405 ;
63-62 =0.0403; 64-63 =0.0401.
Точка 60- точка перегиба,
имеет max приращение ![]() .
.
На реальных кривых точка
перегиба обычно не выражена достаточно четко, поэтому несколько значений ![]() в средней части кривой могут иметь
равные или близкие значения. Выберем точки в которых приращение не отличается.
Таких точек 5. Проведем через эти точки прямую y = mt + С, которая является касательной к
кривой разгона в точке перегиба.
в средней части кривой могут иметь
равные или близкие значения. Выберем точки в которых приращение не отличается.
Таких точек 5. Проведем через эти точки прямую y = mt + С, которая является касательной к
кривой разгона в точке перегиба.
Коэффициенты m и С найдем по методу наименьшего квадрата. Для этого потребуется, чтобы:
 ( 1 )
( 1 )
Взяв частные производные суммы по m и С приравняем их к 0, получим систему из 2-х уравнений с 2-мя неизвестными, решив которую получим:

 |
 |



 |
Уравнение касательной h(t) = mt +C h(t) = 0,244t –1,746
Определим координаты точек пересечения касательной с осью абсцисс и асимптотой уравнений.
 , где mк = у(¥) – отрезок отсекаемый на оси ординат асимптотой; и
абсциссу точки перегиба интерполяцией по формуле.
, где mк = у(¥) – отрезок отсекаемый на оси ординат асимптотой; и
абсциссу точки перегиба интерполяцией по формуле.

Вычислив значения t1 t2 t3 получим отношение:
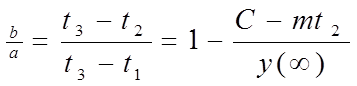
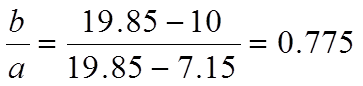
Отношение b/a находится в пределах [0.7357; 0.83], следовательно мы имеем дело с двухъёмкостным объектом.
Аппроксимируя зависимость b/a от T2 /T1 получим:
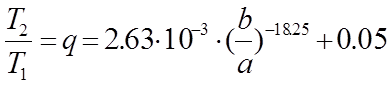
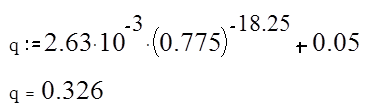 |
Имея ввиду, что  можем составить систему уравнений:
можем составить систему уравнений:
 |
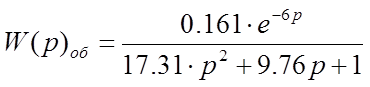
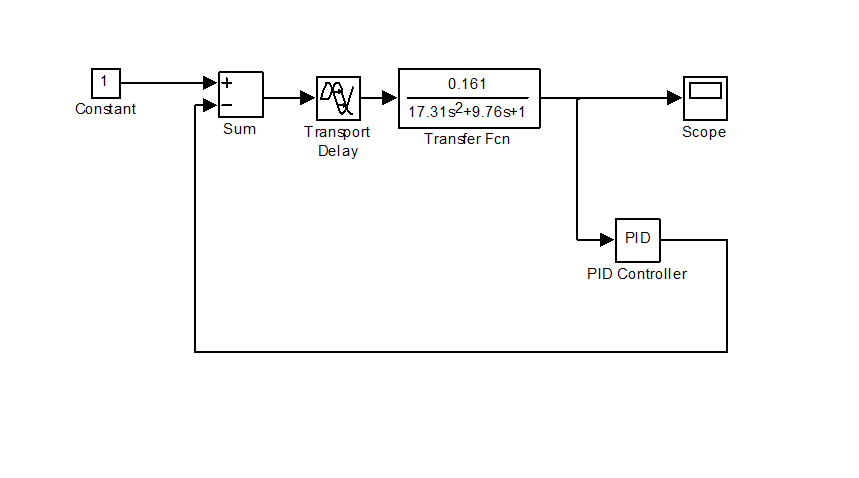
По рассчитанным значениям, теперь можно записать передаточную функцию объекта: передаточная функция модели 2-го порядка выглядит следующим образом

 ;
; ![]() ;
; ![]() .
.
![]()
2 Расчет параметров настройки ПИ-регулятора методом расширенной амплитудно-фазовой характеристики
Передаточная функция имеет вид: -
апериодическое звено.
Коэффициент затухания y = 0.75 m = 0.221
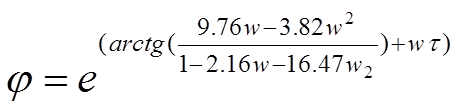
Расширенная частотная характеристика:

![]()




Вычисляем знаменатель:


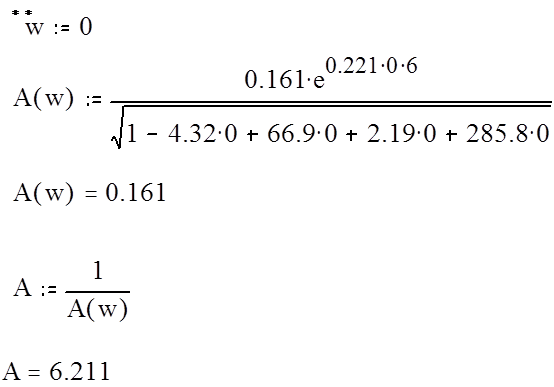 |
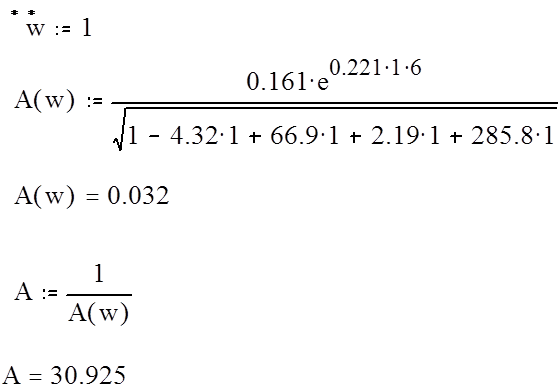
 |
 |
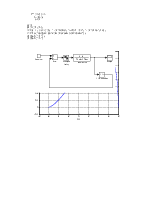
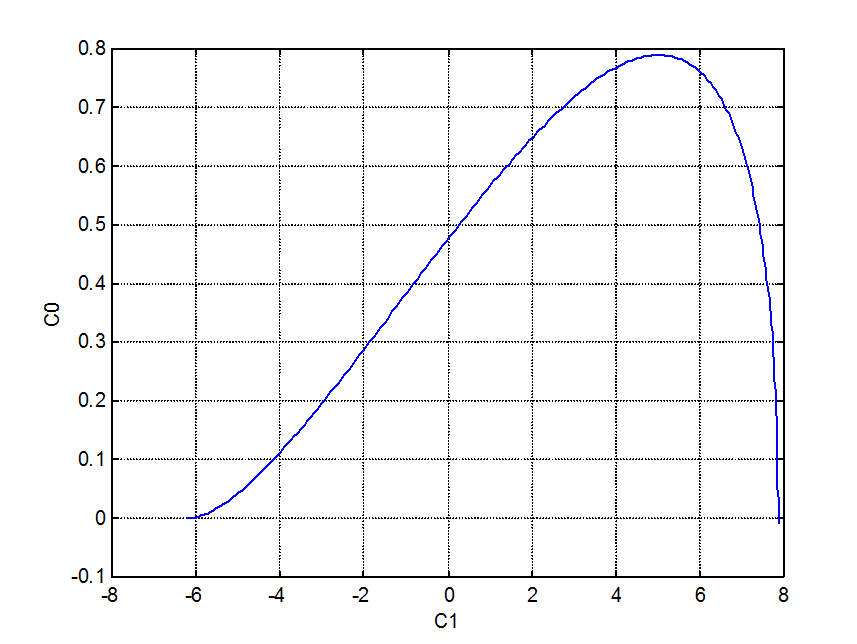
3 Расчет параметров настройки ПИ-регулятора методом незатухающих
function rr
i=0;w=0.001;m=0.256;
%for w=0:0.001:4
while i<=1000
p=(-m+1i)*w*i;
i=i+1;
A=0.161*exp(-p*6)/(17.31*p*p+9.76*p+1);
% A=k1*exp(-p*tau)/(T*p+1);
AO=1/A;
c0(i)=w.*i*(m^2+1).*imag(AO);
c1(i)=m*imag(AO)-real(AO);
%if c0(i)<0
% c0(i)=0;
% c1(i)=0;
%end
if c0(i)<0
i=4005;
end
end
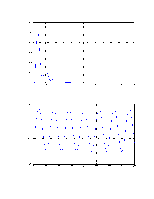
plot(c1,c0),
grid, %, set(gca, 'FontName','Arial Cur','FontSize',16),
%title('График равной степени затухания');
xlabel('C1');
ylabel('C0')
 |
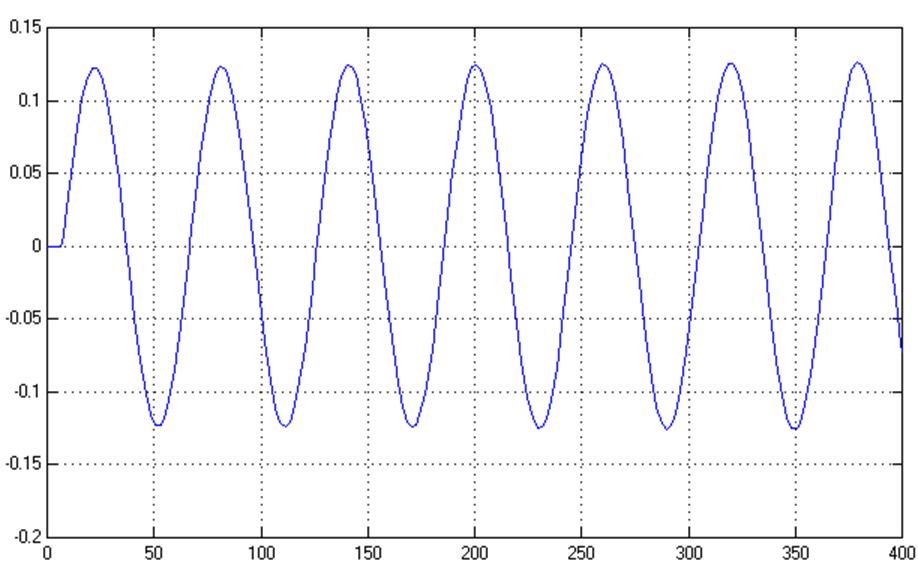 |
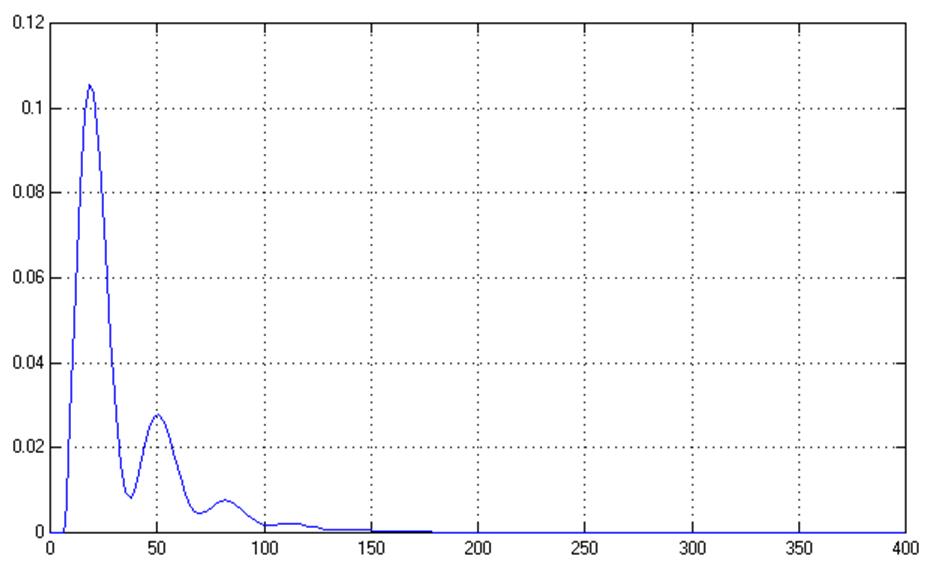
4 Анализ качества настройки регулятора
При определении работоспособности АСР устойчивость является необходимым, но недостаточным условием. Вторая, не менее важная задача – обеспечение качества процесса регулирования. Из всех качественных показателей выделяют наиболее важные, которые достаточно полно определяют качество системы регулирования. К таким показателям относятся: время регулирования t p и пере регулирование s %.
Из всех методов наиболее качественным является настройка регулятора методом расчета по приближенным формулам.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.