В соответствии с этим методом, расчёт настроек ПИД-регулятора проводится в два этапа:
1) Расчёт
критической настройки пропорциональной составляющей ![]() , (C0 = С2 = 0), при
которой АСР будет находится на границе устойчивости, и соответствующее ей
, (C0 = С2 = 0), при
которой АСР будет находится на границе устойчивости, и соответствующее ей ![]() :
:  ; 2)
Определение по
; 2)
Определение по ![]() и
и ![]() оптимальных
настроек (
оптимальных
настроек (![]() ,
,![]() ,
,![]() ) регулятора, обеспечивающих степень
затухания
) регулятора, обеспечивающих степень
затухания ![]() .
.
Рисунок 7.1 – Структурная схема одноконтурной АСР
Передаточные функции W1 и W2 будут иметь вид
 ;
;
 ;
;
 ;
;
 .
.
Так
как интегрирующая и дифференциальная составляющие из условия расчёта равны нулю
(C0 = С2 = 0),
следовательно, при помощи пакета MATLAB (рисунок 7.2) подбираем пропорциональную составляющую ![]() .
.
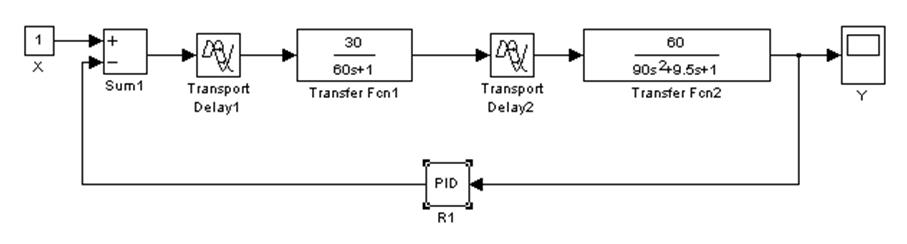
Рисунок 7.2 – Модель одноконтурной АСР в пакете Simulink
Из рисунка 7.3 видно, что период автоколебаний, при котором АСР находится на границе устойчивости, равен: T = 87 сек.
 рад/с.
рад/с.
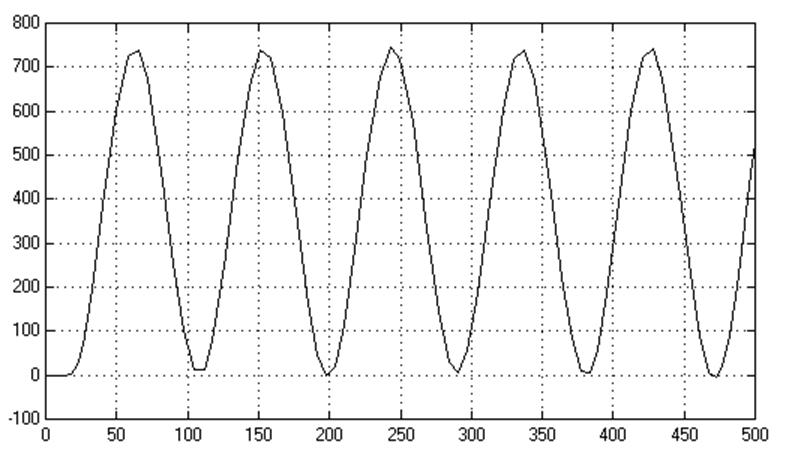
Рисунок 7.3 – Автоколебательный процесс.
Оптимальные настройки ПИД-регулятора находим по формулам:
![]() ,
, ![]() ,
, ![]()
![]() ;
;
![]() ;
;
![]() .
.
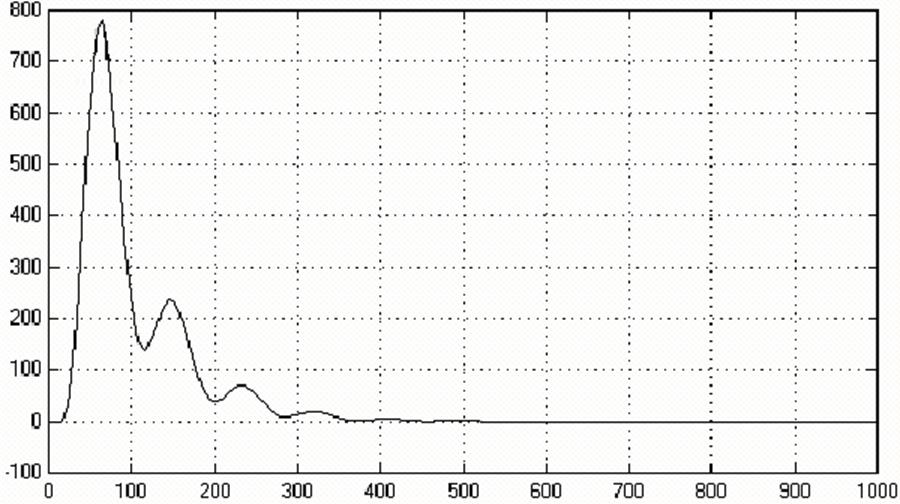
Рисунок 7.4 – Процесс регулирования с оптимальными настройками ПИД-регулятора.
Расчет каскадной АСР предполагает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристиках объекта по основному и вспомогательному каналам.
Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций.
На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту.
В качестве основного регулятора будем использовать ПИ-регулятор, в качестве вспомогательного – П-регулятор.
Рисунок 7.5 – Структурная схема каскадной АСР
Передаточные функции W1 и W2 будут иметь вид
;
;
;
.
Передаточные функции регуляторов имеют вид:
![]() ,
,
 .
.
Передаточная функция эквивалентного объекта для
основного регулятора представляет последовательное соединение замкнутого
вспомогательного контура и основного канала регулирования и определяется по
формуле:  .
.
Передаточная функция эквивалентного объекта для
вспомогательного регулятора является параллельным соединением вспомогательного
канала и основной разомкнутой системы и определяется по формуле: ![]() .
.
Расчет начинаем с основного регулятора. Этот метод используется в тех случаях, когда инерционность вспомогательного канала намного меньше чем основного.
На первом шаге принимаем следующее допущение о том,
что рабочая частота основного регулятора намного меньше, чем вспомогательного ![]() . Тогда при
. Тогда при ![]()
 .
.
Приняв это допущение выражение можно записать
 .
.
Таким образом в первом приближении настройки основного регулятора не зависят от вспомогательного регулятора и находятся по формуле:
 ,
,

Далее используя полученную передаточную функцию, определяем настройки основного регулятора, для чего строим линию равной степени затухания и выбираем на ней оптимальную точку (рисунок 7.6).
Для построения линии равной степени затухания используем MatLab. Программа для расчёта настроек ПИ-регулятора на ЭВМ имеет следующий вид:

function F
i=0; w=0.001; m=0.2562;
while i<=1000
p=(-m+1i)*w*i;
i=i+1;
A=((100*p+2)*exp(-p*8.07))/((75*p*p+8.66*p+1)*exp(-p*5.38));
A0=1/A;
C0(i)=w*i*(m^2+1)*imag(A0);
C1(i)=m*imag(A0)-real(A0);
if C0(i)<0
i=1005;
end
end
plot(C1,C0),
grid,
title('График');
xlabe('C1');
ylabe('C0');
end
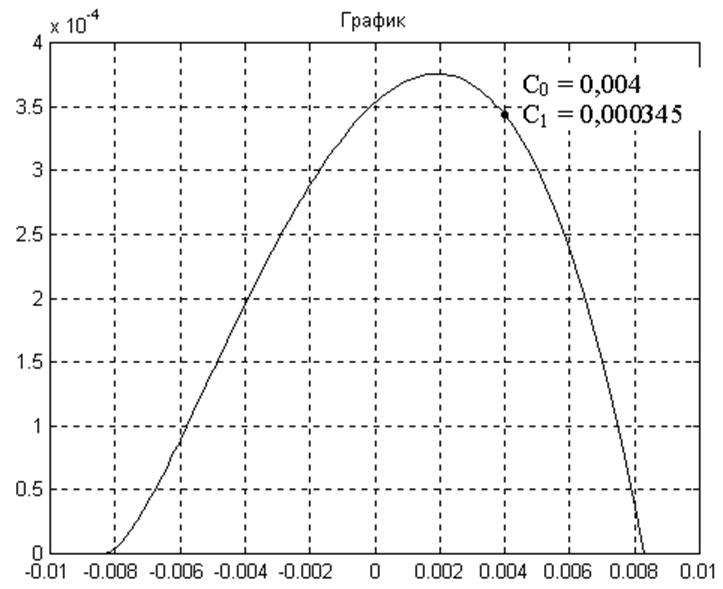
Рисунок 7.6 – Линия равной степени затухания для основного регулятора
На втором шаге рассчитываем настройки вспомогательного регулятора для эквивалентного объекта с передаточной функцией, в которую подставляем полученные настройки С1 = 0,000345 и С0 = 0,004 основного регулятора:

Далее используя полученную передаточную функцию определяем настройки вспомогательного П-регулятора, для чего строим линию равной степени затухания и выбираем на ней оптимальную точку, в которой С1 = 0,1 (рисунок 7.7).
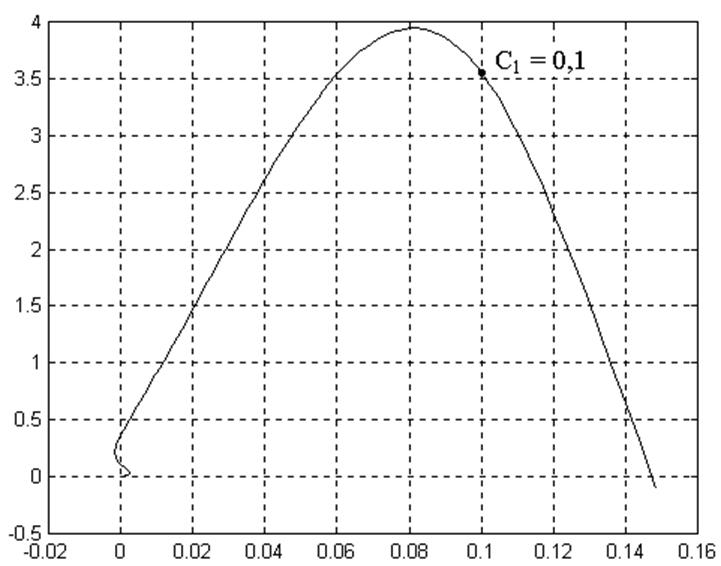
Рисунок 7.7 – Линия равной степени затухания для вспомогательного регулятора
Получив значения оптимальных настроек регуляторов, моделируем каскадную АСР в пакете Simulink (рисунок 7.8).
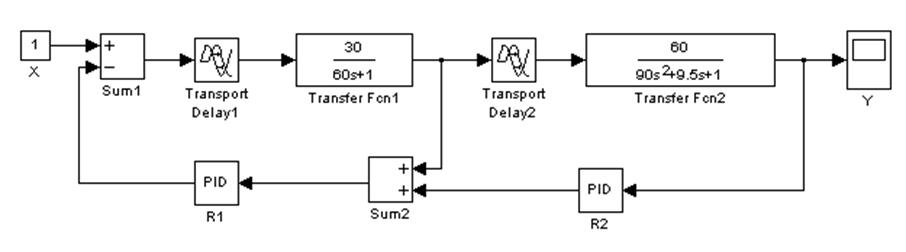
Рисунок 7.8 – Модель каскадной АСР в пакете Simulink
После настройки регуляторов получаем оптимальный процесс регулирования (рисунок 7.9).
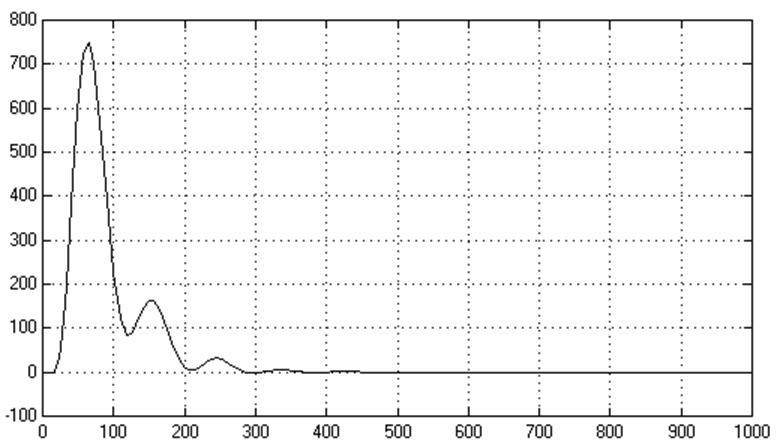
Рисунок 7.9 – Процесс регулирования при оптимальных настройках регуляторов каскадной АСР
Сравним полученный процесс регулирования с процессом при использовании эквивалентной одноконтурной АСР и оптимально настроенного ПИ-регулятора.
Таблица 7.10 – Сравнение одноконтурной и каскадной АСР
|
Тип АСР |
Степень затухания, Ψ |
Максимальное отклонение, σМАХ |
Время регулирования, tР |
|
Каскадная АСР |
0,8 |
750 |
440 |
|
Одноконтурная АСР |
0,8 |
780 |
520 |
Можно сделать вывод, что использование каскадной системы регулирования предпочтительнее, так как качество процесса регулирования заметно улучшается.
В курсовом проекте рассмотрена система автоматизации энергетического тракта СРК. Проведен анализ системы и ее модернизация, улучшающая возможности оператора.
Также были произведены расчёты ПИД-регулятора для одноконтурных АСР методом незатухающих колебаний и регуляторов каскадной АСР, построены графики оптимальных переходных процессов регулирования.
1. Бекин Н. Г., Шанин Н. П. Оборудование заводов резиновой промышленности: Учебное пособие для вузов. — Изд. - 2-е, перераб. и доп. — Л.:, Химия, 1978. — 400 с., ил.
2. Белозеров Н. В. Технология резины: 3-е изд. перераб. и доп. — М.: Химия, 1979. 472 с., ил.
3. Рагулин В. В., Вольное А. А. Технология шинного производства. — Изд. 3-е, перераб. и доп.— М.: Химия, 1981.— 264 с., ил.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.