 ,
,
Тогда, подставив значения f1, f2 , μ1, μ2, γ и g в формулы, получим:
![]() ,
,
![]() .
.
Отсюда находим значения коэффициентов самовыравнивания на стороны притока и оттока жидкости:
 ;
;
 .
.
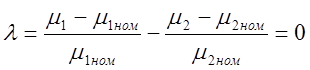
Коэффициент самовыравнивания равен:

Тогда дифференциальное уравнение, описывающее объект, будет имеет вид:
![]() или
или ![]() ,
,
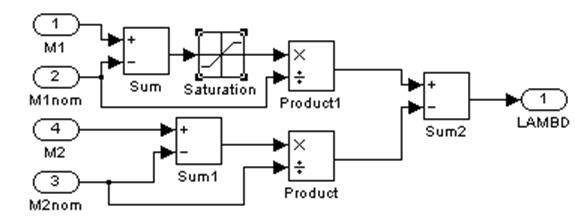
Относительное управление в долях номинальных значений управляющих сигналов:
 ,
,  .
.
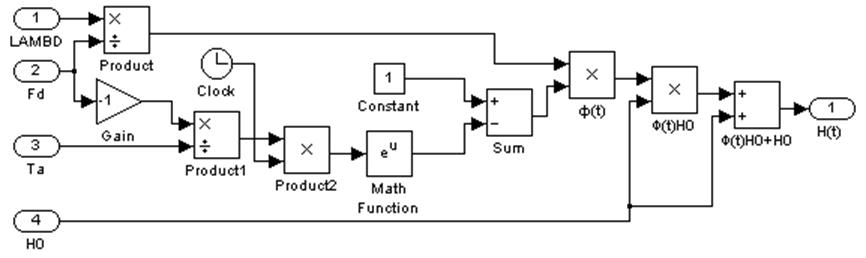
Решение дифференциального уравнения:
 .
.
Уровень жидкости в резервуаре будет равен:
H(t) = Но + ∆H(t)= Но +φ(t) × Но.
С учетом вычисленных значений дифференциальное уравнение принимает следующий вид:
(4266,42р +0,72)× φ (t) = λ(t).
Приводим уравнение к канонической форме, для чего разделим обе части уравнения разделим на FД :
 или
или ![]() ,
,
где  -
постоянная времени объекта;
-
постоянная времени объекта;
 - коэффициент
усиления объекта.
- коэффициент
усиления объекта.
ДУ объекта в канонической форме будет иметь вид:
![]() .
.
С учетом полученного, передаточная функция объекта имеет следующий вид:
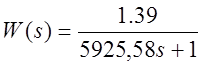 .
.
Исследования модели
Задание для исследования модели
Исследовать переходный процесс:
·
при номинальных значениях коэффициентов истечения ![]() и
и
![]() ;
;
· при изменении коэффициента истечения крана на притоке μ1 ном= 0.3 с номинального значения до μ1i = 0.2 (при этом коэффициент истечения крана на оттоке μ2 остается номинальным);
· при изменении коэффициента истечения крана на оттоке с номинального значения μ2 ном= 0.2 до μ2i = 0.3 (при этом коэффициент истечения крана на притоке номинальным); μ 1 остается
· при изменении коэффициента истечения крана на притоке с μ1 ном= 0.3 до μ1i = 0.2 и изменении коэффициента истечения крана на оттоке с μ2 ном= 0.2 до μ2i = 0.3;
·
при ![]() и
и ![]() .
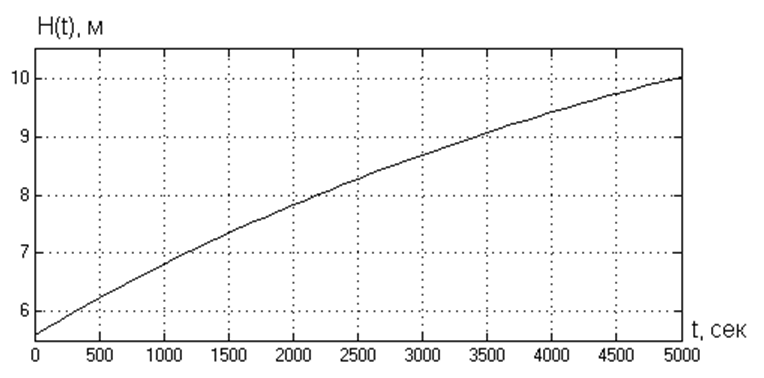
Определить время t,
через которое бак переполнится.
.
Определить время t,
через которое бак переполнится.
Исследования модели
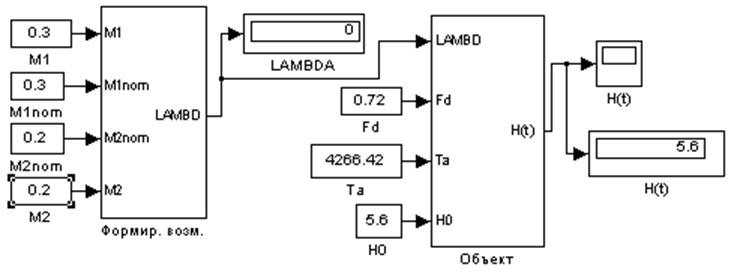
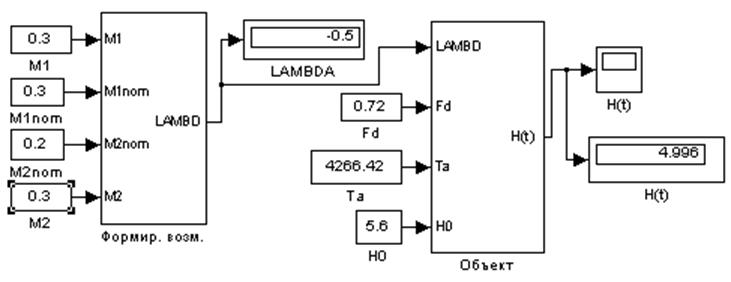
При номинальных значениях коэффициентов истечения: μ1 ном= 0.3 до μ2ном = 0.2;
 .
.
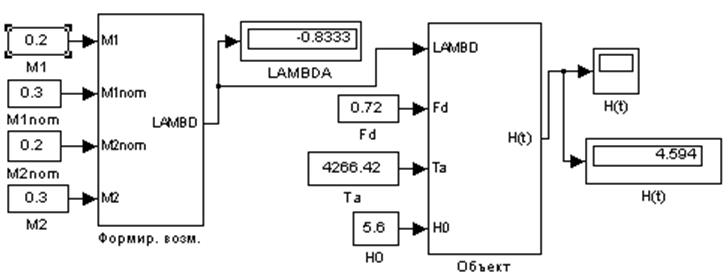
При изменении коэффициента истечения крана на притоке с номинального значения:
μ1 ном= 0.3 до μ1i = 0.2 (при этом коэффициент истечения крана на оттоке μ2 остается
номинальным):
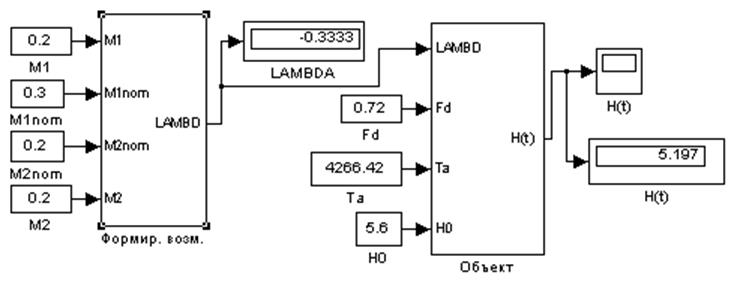
 .
.
При изменении коэффициента истечения крана на оттоке с номинального значения μ2 ном= 0.2 до μ2i = 0.3 (при этом коэффициент истечения крана на притоке μ 1 остается номинальным):
 .
.
При изменении коэффициента истечения крана на притоке с μ1 ном= 0.3 до μ1i = 0.2
изменении коэффициента истечения крана на оттоке с μ2 ном= 0.2 до μ2i = 0.3:
 .
.
При изменении
коэффициента истечения крана на оттоке с μ2 ном= 0.2 до μ2i = 0 (при ![]() ):
):
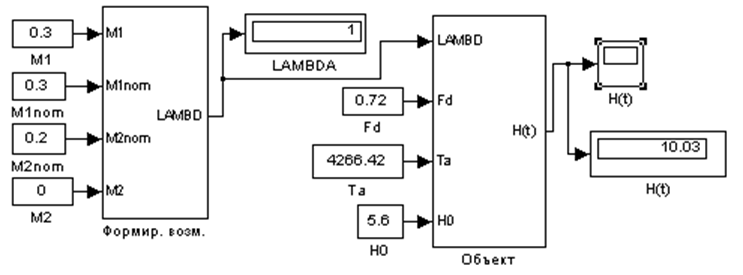
 .
.
Исследование переходного процесса
Блок формирующий возмущение
Объект регулирования (емкость)
Составление модели системы регулирования высоты жидкости в резервуаре с помощью пакета MatLab_60
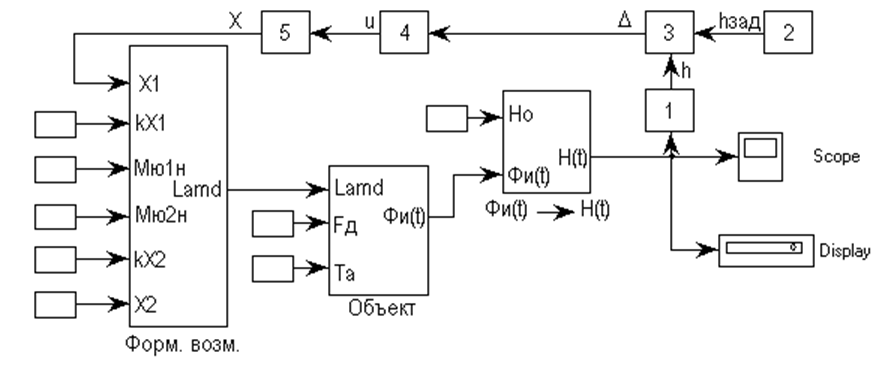
Функциональная схема регулирования уровня жидкости в резервуаре
1 - датчик уровня; 2 - задатчик уровня; 3 - элемент сравнения (нуль-орган); 4 - регулятор; 5 - исполнительный механизм (привод крана); Форм.возм. - звено, формирующее возмущение; Объект - объект регулирования (емкость); φ (t)→Н(t) - подпрограмма, формирующая значение Н(t).
Но - высота жидкости в резервуаре при номинальных параметрах;
H(t) - текущая высота жидкости в резервуаре;
h - сигнал датчика уровня;
hзад - сигнал эадатчика уровня;
∆- сигнал рассогласования;
u - сигнал регулятора;
μ - относительное значение величины открытия крана;
φ(t) - относительное значение уровня жидкости в резервуаре;
Lamb- относительное возмущение.
Передаточные функции элементов АСР
Передаточная функция управляемого объекта:
Qпр → Н 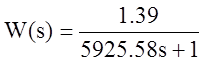 .
.
W(s)=h(s)-hзад(s);
Передаточная функция ПИД – регулятора:
W(s)=P+![]() +Ds;
+Ds;
Передаточная функция датчика:
Н → h W(s) = KДАТ ;
Передаточная функция электропривода крана:

Функциональная схема электропривода крана.
СУ - согласующее устройство; Эл. дв. - электродвигатель; Ред. – редуктор;
ПР. шт. - механизм привода штока крана.
С.У. - согласующее устройство, на вход которого поступает управляющий сигнал в виде напряжения 0...10 В, а на выходе формируется напряжение 0..380 В;
Э. дв. - электродвигатель переменного тока на вход которого поступает ток напряжением О..380 В, а на выходе формируется частота вращения вала двигателя в диапазоне O..25 об/сек пропорциональная напряжению;
Ред. - редуктор (устанавливается передаточное число);
Пр. шт. - привод штока крана, на входе - угол поворота выходного вала редуктора, на выходе - перемещение штока крана.
Передаточная функция согласующего устройства:
u → U (где u - сигнал управления, U - напряжение на зажимах эл. двигателя)
Wв1(s)=КСУ.
U → φдв (где, φдв
-угол поворота вала двигателя)  .
.
Передаточная функция редуктора:
φ→φред (где φред – угол поворота выходного вала редуктора) W(s) = Kред (iред).
Передаточная функция механизма привода штока крана:
φред → Х (где Х – перемещение штока крана) W(s) = Kпр шт .
Передаточная функция электропривода в целом:
u→X 
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.