6) По параметрам трапеции определяем составляющие переходной характеристики. Для каждой трапеции в таблице h – функций ([1], страница 222) отыскиваем столбец, соответствующий значению коэффициента наклона c . Для ряда значений условного времени t определяем соответствующие им значения h(t). По значениям t и h(t) вычисляем значение действительного времени и соответствующие hi переходной характеристики:
 ;
; ![]() . (3.1.12)
. (3.1.12)
Полученные значения t и hi заносим в таблицу 3.1.4.
7) Строим графики составляющих переходной характеристики (рисунок 3.1.4).
8) Строим график переходной характеристики (рисунок 3.1.5). Ординаты переходной характеристики определяем суммированием ординат составляющих в выбранные моменты времени.
3.1.4 Выбор корректирующего устройства
Корректирующие устройства систем регулирования осуществляют преобразование сигнала управления. С этой целью их составляют из элементов, которые удобно называть преобразовательными.
1) Строим ЛАЧХ последовательного корректирующего устройства (рисунок 3.1.1), для которой справедливо соотношение:
Lк(w) = Lж(w) – L0(w) (3.1.13).
2) Исходя из ЛАЧХ корректирующего звена, выбираем принципиальные схемы и передаточные функции корректирующих звеньев, состоящих из пассивных четырёхполюсников постоянного тока (таблица 3.1.6). Это электрические цепи из резисторов и конденсаторов.
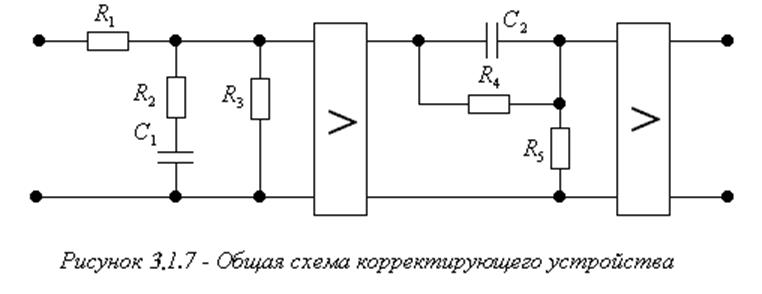
Чтобы обеспечить полученное ЛАЧХ корректирующего устройства (рисунок 3.1.1), необходимо включить три звена и три усилителя (рисунок 3.1.6),для обеспечения подъема высокочастотного участка ЛАЧХ над осью абсцисс и предотвращения падения напряжения и мощности.
Таблица 3.1.5 – Типовые пассивные четырёхполюсники постоянного тока
|
№ |
Принципиальная схема |
Передаточная функция |
|
1 |
K1 = 0,75; C1 = 1,3 мкФ; R1 = 0,67кОм; R2 = 6,8кОм; R3 = 0,22кОм;
|
|
|
2 |
К2 = 0,1884; С2 = 1,2 мкФ; R4 = 18 кОм; R5 = 4,3 кОм;
|
Продолжение таблицы 2.1.5
|
№ |
Принципиальная схема |
Передаточная функция |
|
3 |
|
3) Рассчитанные звенья корректирующего устройства, соединяем последовательно(рисунок 3.1.7): через разделительный усилитель, который компенсирует понижение уровня сигнала, вызываемого пассивными четырехполюсниками.
 |
Заключение
В данной курсовой работе мы провели исследования на устойчивость линейной АСР по различным критериям. Из исследований видно, что АСР в большинстве случаев находится в устойчивом состоянии, а в последнем случае - на грани устойчивости.
А
так же был проведен расчет последовательного корректирующего устройства и построение
переходного процесса автоматической системы регулирования по заданным показателям
качества. Из графика временной характеристики видно, что данная система соответствует
заданным показателям качества (время регулирования системы ![]() , перерегулирование
, перерегулирование ![]() ).
).
Список использованных источников
1. Теория автоматического управления/Под редакцией А.А.Воронова – ч.1 и ч.2.- М.: Высшая школа, 1986. – 376с и 504с.
2. Теория автоматического управления: Методическое указание к выполнению курсовых работ для студентов специальности 21.02 всех форм обучения./Составитель Дорошенко В.А., Захаров М.И и др. – Красноярск: СТИ, 1991. – 24с.
3. Попов Е.П. Теория линейных систем автоматического регулирования. – М.: Наука, 1978. – 250с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
;
 ;
; .
. ;
;
 ;
; .
. .
.