





























ВВЕДЕНИЕ
Механизация и комплексная автоматизация промышленности и транспорта во многом зависят от создания совершенных средств автоматического взвешивания и дозирования сыпучих материалов и жидкостей в химической, металлургической, угольной и пищевой промышленности, строительстве, железнодорожном, речном и морском транспорте, производстве стройматериалов и пластмасс.
Разработка совершенных типов весов и весовых дозирующих приборов ведется на базе применения упругих весовых элементов, электрорезистивных, вибрационно-частотных, магнито-анизотропных, ферродинамических, пневматических датчиков в совокупности с наиболее совершенными электрическими, пневматическими, гидравлическими агрегатными унифицированными системами регулирования, управляемыми по различным технологическим показателям счетно- аналитическими машинами и другими средствами автоматизации.
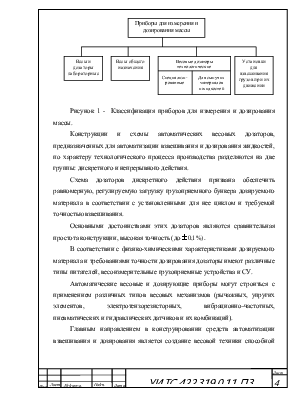
Приборы и средства автоматизации для измерения и дозирования массы, предназначенные для автоматизации взвешивания, учета и дозирования различных материалов, сырья, полуфабрикатов и готовой продукции, включают в себя различные весы и весовые дозаторы. Возможная классификация весов и весовых дозаторов в зависимости от погрешности, пределов и производительности, уровня их автоматизации и области применения охватывает 4 основные группы (рисунок 1):
 |
Рисунок 1 - Классификация приборов для измерения и дозирования массы.
Конструкции и схемы автоматических весовых дозаторов, предназначенных для автоматизации взвешивания и дозирования жидкостей, по характеру технологического процесса производства разделяются на две группы: дискретного и непрерывного действия.
Схема дозаторов дискретного действия призвана обеспечить равномерную, регулируемую загрузку грузоприемного бункера дозируемого материала в соответствии с установленными для нее циклом и требуемой точностью взвешивания.
Основными достоинствами этих дозаторов являются сравнительная простота конструкции, высокая точность (до ± 0,1%).
В соответствии с физико-химическими характеристиками дозируемого материала и требованиями точности дозирования дозаторы имеют различные типы питателей, весоизмерительные грузоприемные устройства и СУ.
Автоматические весовые и дозирующие приборы могут строиться с применением различных типов весовых механизмов (рычажных, упругих элементов, электротензорезисторных, вибрационно-частотных, пневматических и гидравлических датчиков и их комбинаций).
Главным направлением в конструировании средств автоматизации взвешивания и дозирования является создание весовой техники способной обеспечить не только измерение массы – взвешивание, но и автоматическое управление и регулирование технологическими процессами. Современные автоматические весовые и дозирующие устройства являются основным звеном комплексной автоматизации в различных отраслях промышленности.
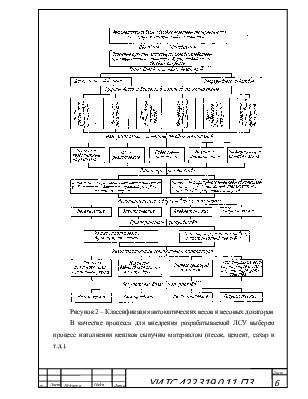
Классификация автоматических весовых и дозирующих приборов для сыпучих материалов и жидкостей строится в соответствии со структурой построения технологического процесса, т.е. с размещением оборудования по высоте, с движением материалов в потоке самотеком и при горизонтальном размещении оборудования, с конвейерной транспортировкой материалов.
В соответствии с таким делением технологических процессов производства автоматические весы и весовые дозаторы классифицированы на две основные группы (рисунок 2):
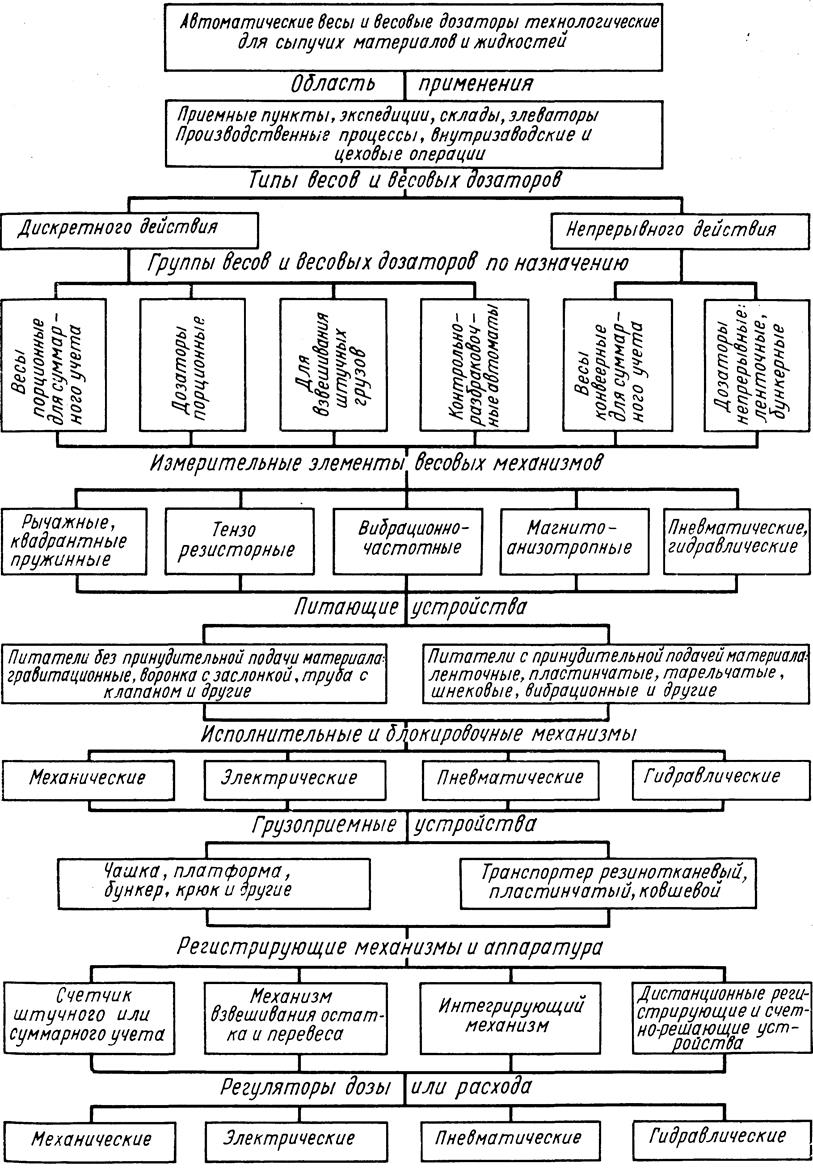
Рисунок 2 – Классификация автоматических весов и весовых дозаторов
В качестве процесса для внедрения разрабатываемой ЛСУ выберем процесс наполнения мешков сыпучим материалом (песок, цемент, сахар и т.д.).
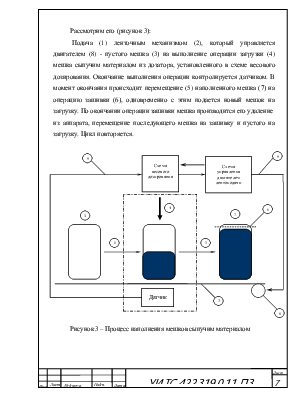
Рассмотрим его (рисунок 3):
Подача (1) ленточным механизмом (2), который управляется двигателем (8) - пустого мешка (3) на выполнение операции загрузки (4) мешка сыпучим материалом из дозатора, установленного в схеме весового дозирования. Окончание выполнения операции контролируется датчиком. В момент окончания происходит перемещение (5) наполненного мешка (7) на операцию зашивки (6), одновременно с этим подается новый мешок на загрузку. По окончании операции зашивки мешка производится его удаление
из аппарата, перемещение последующего мешка на зашивку и пустого на загрузку. Цикл повторяется.
Рисунок 3 – Процесс наполнения мешков сыпучим материалом
1 – подача пустого мешка на загрузку;
2 – лентоподающий механизм;
3 – пустой мешок;
4 – загрузка;
5 – перемещение наполненного мешка;
6 – зашивка;
7 – наполненный мешок;
8 – двигатель лентоподающего механизма;
9 – линии связи и управления.
Механизм автоматической загрузки мешков является многосвязным объектом, т.е. в нем необходимо управлять несколькими величинами и соответственно устанавливать несколько локальных систем управления.
По заданию курсового проекта необходимо разработать локальную (управляющую одним параметром) систему управления.
Выберем параметр управления:
– регулирование расхода сыпучего материала.
Параметр эффективности:
- масса сыпучего материала, оказавшегося в мешке.
1 РАСШИРЕННОЕ ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1.1 Название
"Система автоматического регулирования расхода сыпучих материалов"
1.2 Требования, предъявляемые к ЛСУ
Требования, предъявляемые к системам управления автоматических весовых дозаторов, должны соответствовать задаче автоматизации технологических процессов. В самом общем случае они могут быть сформулированы следующим образом.
Должны быть установлены алгоритмы и оптимальные схемы управления дозаторами дискретного и непрерывного действия, обеспечивающие однокомпонентное и многокомпонентное дозирование материалов с требуемыми метрологическими и функциональными зависимостями в системах автоматического регулирования и управления технологическими процессами производства.
Решению этой важной научно-технической проблемы должны предшествовать создание автономных и связных агрегатных систем управления однокомпонентного и многокомпонентного дозирования с унифицированными входными и выходными сигналами (электрическими, пневматическими и гидравлическими), обеспечивающих коррекцию регулируемых параметров по сигналам датчиков, характеризующих различные показатели процесса и показатели качества конечного продукта или полупродукта.
Автоматические весовые дозаторы дискретного действия в настоящее время особенно широко применяются в различных отраслях народного хозяйства.
1.2.1 Энергоемкость
Проектируемое дозирующее устройство должно обеспечивать дозирование сыпучих материалов по 50 кг в упаковку.
Произведем расчет энергоемкости:
![]()
Выпуск за смену:
![]()
За час:
![]()
Один мешок- ![]()
Энергоемкость человека составляет порядка 100 Вт, таким образом человек не в состоянии обеспечить выполнение данного процесса в ручную.
Вывод - ЛСУ необходима, её разработка и внедрение оправданы.
1.2.2 Вид потребляемой энергии
Устройство работает на напряжении 380 Вт.
Обязательно должен иметься нулевой провод.
Отклонение напряжения ± 10 Вт.
Частота 50 Гц
1.2.3 Надежность
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.