Для данной САР дозирования сыпучего материала, выберем электротензорезисторный датчик типа ДСТБ-С-016. Особенностью таких датчиков является повышенная жесткость силоизмерительных элементов, малая инерционность, малогабаритность и небольшая металлоемкость конструкций. Кроме того, электротензорезисторные датчики практически не требуют специальных условий, которые бы препятствовали их широкому применению в промышленности.
Электротензорезисторные методы измерения основаны на использовании тензоэффекта, состоящего в изменении электрического сопротивления проволочной (фольговой, монокристаллической) решетки, наклееной (подвесной, навитой) на упругий элемент, при ее деформации под нагрузкой. Электротензорезисторные датчики основаны на существовании линейной зависимости между деформацией грузоприемного упругого элемента

и относительным изменением электрического сопротивления проволочного датчика
![]()
где s – тензочувствительность, определяемая экспериментально
Тензочувствительность является постоянной величиной для данного материала проволоки и в небольших пределах изменяется в зависимости от изменения геометрии решетки датчика.
Основными характеристиками датчиков являются: предел измерения от 0,001 до 200 тс, чувствительность, погрешности (0,1; 0,2; 0,5%) основные – линейность характеристики, вариация показаний, гистерезис; погрешности дополнительные – температурные влияния, фактор времени; допускаемые перегрузки; рекомендуемое напряжение питания; габаритные размеры (длина, высота, диаметр и др.), входное и выходное сопротивление; герметичность и др.
 |
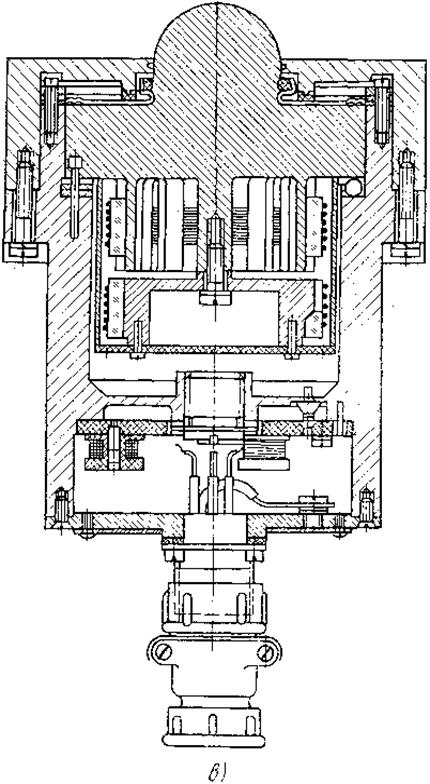 |
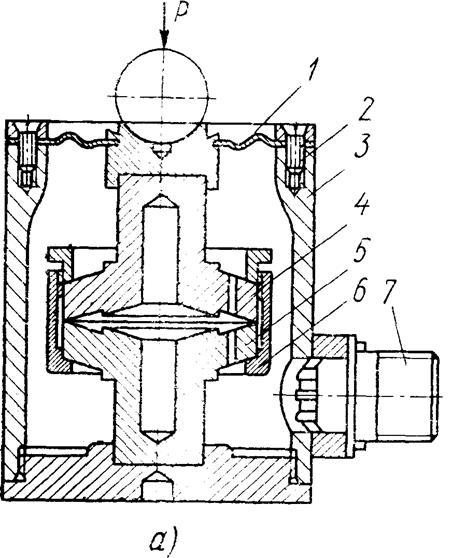
Рисунок 5 - Датчики тензорезисторные силоизмерительные:
а – общий вид; б – упругий элемент датчика; в – датчик типа ДСТБ-С-016
1 – мембрана;
2 – кольцо;
3 – корпус;
4, 5 – упругие элементы;
6 – обойма;
7 – четырехгранный разъем.
В конструкции датчика (рисунок 5, а) использованы два упругих элемента, при нагружении которых их диаметры по опорным поверхностям увеличиваются одновременно и на одинаковую величину. Такой механизм работы опорных поверхностей исключает взаимное трение звеньев по контуру, что способствует сохранению стабильности работы датчика и позволяет получить на одном датчике четырехплечий мост высокой чувствительности.
Упругие элементы (рисунок 5, а) 4 и 5 заключены в обойму 6. В таком виде чувствительный элемент устанавливается в корпус 3, имеющий мембрану 1, при помощи кольца 2, герметически закрывающую внутреннюю полость. Соединение с кабелем осуществляется через четырехгранный разъем 7. Датчик имеет температурную компенсацию.
Передаточная функция силоизмерительного тензорезисторного датчика имеет вид:
где
кк – передаточный коэффициент датчика
Тк – постоянная времени датчика
Выходная величина датчика: 0 – 10 В
Входное сопротивление сумматора равно 2000 Ом, таким образом в соответствии с законом Ома для постоянного тока ток с цепи сумматора равен:
Таким образом, происходит согласование датчика и сумматора
к = 10 В/m
m = 50 кг
к = 10/50= 0.2 В/кг
Т = 1/3tп = 1/3·0,05 сек = 0,017 сек
Подставляя полученные коэффициенты, получим:
4 РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ
Рисунок 8 - Структурная схема системы
Передаточная функция разомкнутой системы будет иметь вид:
![]()


Передаточная функция замкнутой системы будет иметь вид:



Произведем оценку системы на устойчивость.
Устойчивость – это свойство системы возвращаться в исходный или близкий к нему режим после всякого выхода из него в результате какого-либо возмущения.
Оценку устойчивости проведем по критерию Гурвица.
Критерий Гурвица
формирует условия устойчивости в виде определителя. Условие устойчивости по
Гурвицу сводится к тому, чтобы при ![]() все диагональные
миноры главного определителя были также положительны.
все диагональные
миноры главного определителя были также положительны.
Рассмотрим характеристическое уравнение разомкнутой системы:
![]()
Раскроем скобки:
![]()
![]()
![]()
![]()
![]()
Составим определитель:

![]()
![]()

![]()
Так как главный определитель и его диагональные миноры положительны, то необходимое и достаточное условия устойчивости системы выполняются.
5 ПОСТРОЕНИЕ ЛАЧХ СИСТЕМЫ
 |
Рисунок 9 – ЛАЧХ нескорректированной системы
 |
Рисунок 10 – Переходный процесс нескорректированной системы
По графику определим
время переходного процесса: ![]()
Так как такие показатели не соответствуют техническому заданию, проводим корректировку.
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ, ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Поднимем ЛАЧХ над осью ![]() введением дополнительного усилительного
звена с коэффициентом передачи
введением дополнительного усилительного
звена с коэффициентом передачи ![]() и производим
построение желаемой ЛАЧХ.
и производим
построение желаемой ЛАЧХ.
Строим желаемую ЛАЧХ:
Желаемой - называют
асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые)
статические и динамические свойства. Строится желаемая ЛАЧХ на основании
требований к системе. Низкочастотная асимптота ЛАЧХ разомкнутой системы
определяет статические свойства. Если передаточная функция разомкнутой системы
имеет передаточный коэффициент ![]() и порядок астатизма
и порядок астатизма
![]() , удовлетворяющий требованиям, то
низкочастотная асимптота желаемой ЛАЧХ является низкочастотной асимптотой
неизменной части системы.
, удовлетворяющий требованиям, то
низкочастотная асимптота желаемой ЛАЧХ является низкочастотной асимптотой
неизменной части системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.