И наконец, рассмотрим еще одну возможность значительно уменьшить вносимые АРУР нарушения в первичную обработку сигналов. В некоторых наших разработках, например, вАРУРсдискретно-ана-логовым управлением (ДАУ), время восстановления было адаптивным к сигналу. Присущие ДАУ недостатки не позволяют рекомендовать его теперь к применению, но время восстановления, зависящее от длительности превышения сигналом нормированного уровня, вполне заслуживает внимания. При случайных кратковременных выбросах коэффициент передачи АРУР восстанавливается очень быстро (за 0,1 ...0,2 с), но если превышение составляет более 0,3 с, то время восстановления начинает увеличиваться и может достигнуть 8...10 с. Такие случаи возможны, если сигналы музыкальной передачи окажутся по каким-то причинам с очень завышенным уровнем. Звукорежиссеры считают, что искажения, вносимые в обработку сигналов таким авторегулятором, значительно меньше, чем обычным инерционным ограничителем уровня. Но работа поспедо-
вательно включенных ACT и ОУР предпочтительнее хотя бы потому, что у них пороги срабатывания могут выставляться независимо друг от друга и результаты получаются лучше. Кроме того, введя частотную коррекцию в цепь управления ACT, можно уменьшить различие в громкости звучания речевых и музыкальных передач [9]. Ведь сейчас эта проблема стала весьма актуальной, когда слишком громкая реклама вынуждает убавлять громкость или просто выключать звук.
Здесь шла речь о некоторых особенностях работы и настройки авторегуляторов и их влиянии на качество звучания звуковых сигналов, однако надо заметить, что рассмотренными примерами не исчерпывается весь перечень задач, которые могут решать автоматические регуляторы уровня звуковых сигналов.
ЛИТЕРАТУРА
1. Ефимов А. П. Радиовещание. — М.:
Связь, 1975.
2. Гришин А. М., Кузнецов Э. Б. Стабилизация уровней сигналов в тракте формирования вещательных программ. — Электросвязь. 1978, № 5.
3. Островский В. С. О точности регулировки уровня звукорежиссерами. Труды ВНИ-ИТР.ВЫП.6.--М., 1968.
4. Никонов А. В., Папернов Л. 3. Измерители уровня звуковых сигналов. — М.: Радио и связь, 1981.
5. Валентин и Виктор Лексины. Еще раз о регуляторах на полевых транзисторах. — Радио, 1981, N 7,8.
6. Есаков В. Ф., Кудрин И. Г., Шноль М. М. Автоматическая регулировка усиления в усилителях низкой частоты. М.: Энергия, 1970.
7. Нюренберг В. А., Млодзеевская И. А. Автоматические регуляторы уровня вещательных передач. — М.: Связьиздат, 1963.
8. Кузнецов Э. Б. Работа автоматических регуляторов уровня типа "Норма" в тракте формирования программ, — Электросвязь, 1985, № 6.
9. Кузнецов Э. Б. Автоматические регуляторы уровня звуковых сигналов "Норма". — Техника кино и телевидения, 1982, № 10.
Р 9/98-16
|
ВАРИАНТЫ ПОСТРОЕНИЯ RS-ТРИГГЕРА А. САМОЙЛЕНКО, г. Клин Московской обл. Область применения RS-триггера чрезвычайно широка. Всем, кто работает в цифровой технике, приходится часто сталкиваться с проблемой оптимального построения этого узла. Неудивительно поэтому, что этому вопросу "Радио" уделяет довольно много внимания. Предлагаемую статью следует рассматривать как попытку дополнить уже имеющиеся на эту тему публикации. |
При проектировании своих конструкций с RS-триггерами многие радиолюбители используют известные и часто применяемые в интегральной схемо-технике классические схемы (рис. 1,а и б). Такой триггер требует минимум двух простейших логических элементов, причем собранный на элементах одного типа он имеет либо только прямые, либо только инверсные установочные входы, что в некоторых случаях приводит к необходимости введения одного или даже двух дополнительных инверторов.
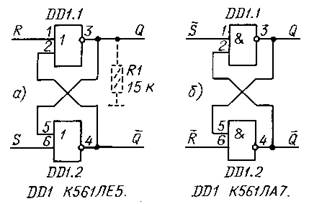
Рис. 1
Для радиолюбителя, очевидно, представляет интерес решение вопроса о RS-триггере, имеющем заданный вид входов (либо инверсные, либо прямые, или один инверсный, а другой — прямой) и собранном на тех элементах, которые у него есть в наличии. Могут быть использованы и резервные элементы в составе какой-либо собираемой конструкции (зачастую они разнотипны). Иногда бывает нужно увеличить число узлов той или иной готовой конструкции либо усовершенствовать ее путем замены логических элементов ("перемещения" их из одного блока в другой), либо в готовое устройство ввести дополнительный RS-триггер. В таких ситуациях выходом из положения будет применение RS-триггеров, собранных по нестандартным схемам. Этим объясняется появление публикаций [1—3].
Детальное рассмотрение этого вопроса показывает, что в дополнение к вариантам, описанных в [1 и 2], RS-триггер может быть реализован на любых простейших элементах, даже имеющих всего один вход (вплоть до логического повторителя и инверторов), и их различных сочетаниях. При реализации этого узла необходимо учитывать следующие характеристики классического RS-триггера:
1 — свойство находиться в одном из двух устойчивых состояний, каждое из
которых триггер сохраняет при отсутствии входных установочных импульсов неограниченно долго;
2 — наличие жесткой положительной обратной связи (ОС) с коэффициентом передачи в петле, значительно большим 1, скачкообразный переход из одного состояния в другое;
3 — минимум два входа: R (R) — установка в состояние 0, S (S)— установка в состояние 1;
4 — два взаимно-инверсных выхода. В упрощенном варианте, если примененный элемент всего один, может быть один выход;
5 — исходное напряжение входов не мешает хранению записанной информации. Для прямых установочных входов R и S это низкий уровень, а переключение происходит в момент подачи кратковременного импульса высокого уровня. Для инверсных входов R и S — это высокий уровень, а переключается триггер при подаче кратковременного импульса низкого уровня (рис. 2);
6 — подача управляющего импульса устанавливает триггер в состояние, однозначно определяемое тем входом, на который был подан импульс;
7 — повторная подача такого же управляющего импульса не изменяет состояние RS-триггера, а сами управляющие сигналы на выходы триггера не проходят.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.