В проекте принята система телемеханики для электрификации железных дорог, по территориальному размещению с сосредоточенными объектами; по способу избирания- с групповым четырёхступенчатым избиранием; по способу размещения элементов сигнала- с временным признаком; по способу разделения сигналов в канале связи- с частотным разделением.
Структурная схема телемеханизированной дистанции электроснабжения представлена на рис. 1.
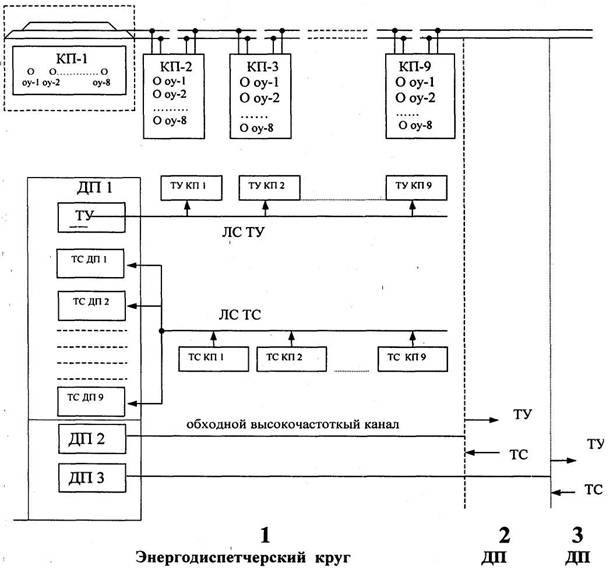
Рис.1
1. 2. Расчет ёмкости системы телемеханики.
Ёмкость системы телемеханики определяется исходя из заданного количества управляемых и контролируемых объектов. В устройствах телеуправления системы телемеханики для передачи приказов всем контролируемым пунктам с диспетчерского пункта используется один канал связи. Ёмкость устройства определяется количеством приказов, которые необходимо передать с диспетчерского пункта на все КП.
Эта ёмкость может быть определена по формуле:
![]()
где
![]() -
количество контролируемых пунктов,
-
количество контролируемых пунктов,
![]() -
количество объектов управления на контролируемом пункте;
-
количество объектов управления на контролируемом пункте;
![]() -
количество состояний объектов.
-
количество состояний объектов.
По
заданию: ![]() =
2 ,
=
2 , ![]() =
20 ,
=
20 , ![]() =
2 .
=
2 .
![]()
Передающее устройство ТС на каждом КП связано со своим приёмным устройством на диспетчерском пункте отдельным каналом связи, поэтому ёмкость одного устройства ТС определяется по формуле:
![]() ,
,
где
![]() -
количество объектов, состояние которых сигнализируется.
-
количество объектов, состояние которых сигнализируется.
![]() .
.
Ёмкость всего устройства ТС определяется по формуле:
![]()
![]()
2. ВЫБОР СПОСОБА КОДИРОВАНИЯ И ПРОЕКТИРОВАНИЕ ИМПУЛЬСНОЙ СЕРИИ И КОДОВОЙ ТАБЛИЦЫ КОМАНД ТУ.
2. 1. Выбор способа кодирования.
Выбор способа кодирования определяется характером и ответственностью передаваемой информации, характеристиками канала связи, допустимым временем передачи сообщений, требуемой ёмкостью устройства и выполняемой им функцией. От принятого способа кодирования зависит степень сложности отдельных функциональных узлов проектируемого устройства.
В курсовом проекте применяется прямой распределительный способ избирания для выбора номера объекта.
Выбор способа кодирования должен способствовать упрощению функциональных узлов и обеспечивать передачу сообщений в объёме требуемой ёмкости системы. При этом число элементов телемеханических сигналов в импульсной серии должно согласовываться с числом позиций распределителя импульсов, построенных на основе многоразрядного счетчика. Количество позиций определяется по формуле:
![]()
![]()
где n- число разрядов счётчика распределителя.
Импульсная серия, состоящая из коротких элементов и сверхдлинного фазирующего, называется холостой. Импульсная серия, в которой закодирован приказ или сообщение, называется командной. Она состоит из элементов с коротким и длинным временным импульсным признаком. Заканчивается командная импульсная серия также фазирующим элементом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.