Используя выражение связи между АКФ выходного ![]() и
входного сигналов
и
входного сигналов ![]() линейной дискретной
системы
линейной дискретной
системы ![]() , где h[m]- импульсная характеристика, определим аналитически АКФ
выходного сигнала для системы с уравнением:
, где h[m]- импульсная характеристика, определим аналитически АКФ
выходного сигнала для системы с уравнением:
![]()
при входном сигнале в виде белого шума с АКФ ![]() ,
при этом
,
при этом ![]() - дисперсия (мощность) шума,
- дисперсия (мощность) шума, ![]() - единичный дельта-импульс.
- единичный дельта-импульс.
Найдем импульсную характеристику системы:
![]()
Запишем выражение связи между АКФ выходного и входного сигналов ЛДС:
![]()
Вычислим свертку импульсных характеристик h[n] и h[-n]:
![]()
АКФ для выходного сигнала:
![]()
Найдем АКФ выходного сигнала, используя процедуру conv() Matlab, в
качестве входа будем использовать случайный процесс X из п.1. Построим
график ![]() .
.
n=-2:2;
h1=[5 2 -1];
h2=[-1 2 5];
y1=conv(h1,h2)
stem(y1)
>>
y1 =
-5 8 30 8 -5
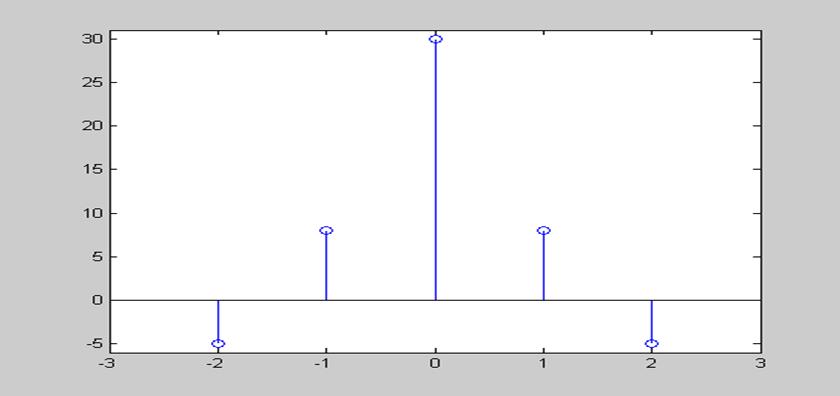
Рис. 3. График АКФ выходного сигнала.
4.Генерация
случайного сигнала X длительностью 1000 отсчетов, распределенного по нормальному
закону с нулевым средним значением и единичной дисперсией. Вычисление выходного
сигнала Y, используя уравнение системы по индивидуальному
заданию. Построение на одной фигуре 4 графиков рассеяния с помощью функции plot(X, Y, ‘.’) для четырех случаев:
а) (Yi, Yi+1), б) (Yi, Yi+2),
в) (Yi, Yi+3), г) (Yi, Yi+4)
(i =1,2,…,900).
а)
X=randn(1,1000);
n=3:1000;
Y(n)=5*X(n)+2*X(n-1)-X(n-2);
i=1:900;
Y0(i)=Y(i);
Y1(i)=Y(i+1);
subplot(411)
plot(Y0,Y1,'.')
title('Graph of the diffusing Yi,Yi+1')
б)
Y2(i)=Y(i);
Y3(i)=Y(i+2);
subplot(412)
plot(Y2,Y3,'.')
title('Graph of the diffusing Yi,Yi+2')
в)
Y4(i)=Y(i);
Y5(i)=Y(i+3);
subplot(413)
plot(Y4,Y5,'.')
title('Graph of the diffusing Yi,Yi+3')
г)
Y6(i)=Y(i);
Y7(i)=Y(i+4);
subplot(414)
plot(Y6,Y7,'.')
title('Graph of the diffusing Yi,Yi+4')
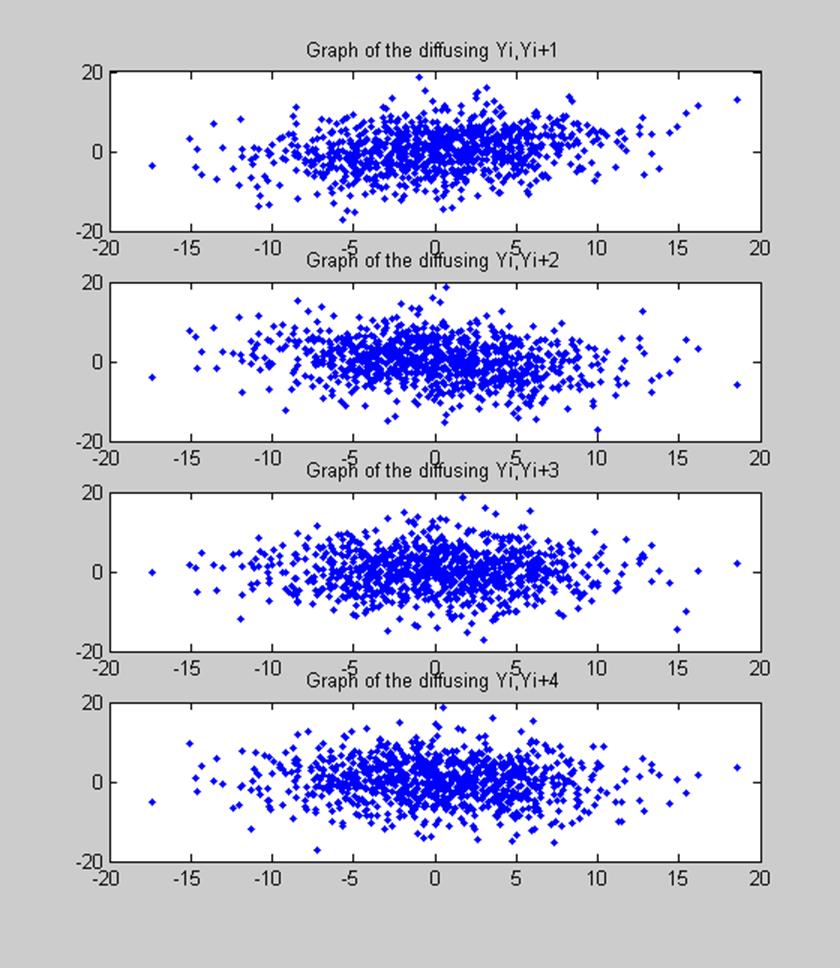
Рис. 4. Графики рассеяния для случаев
а) (Yi, Yi+1), б) (Yi, Yi+2), в) (Yi, Yi+3), г) (Yi, Yi+4)
Выводы: ![]() при этом АКФ для СШС процессов не изменяется с
изменением временного аргумента n, а зависит только от расстояния (сдвига) m.
АКФ определяет, как сильна связь между отсчетами сигнала, разделенными друг от
друга интервалом m. Для реальных случайных сигналов с увеличением интервала
m между отсчетами степень связи должна ослабевать в
связи с уменьшением влияния инерционности реального процесса. Поэтому и
рассеяние на последнем графике наиболее заметное, так как степень связи между
отсчетами сигнала наиболее слабая.
при этом АКФ для СШС процессов не изменяется с
изменением временного аргумента n, а зависит только от расстояния (сдвига) m.
АКФ определяет, как сильна связь между отсчетами сигнала, разделенными друг от
друга интервалом m. Для реальных случайных сигналов с увеличением интервала
m между отсчетами степень связи должна ослабевать в
связи с уменьшением влияния инерционности реального процесса. Поэтому и
рассеяние на последнем графике наиболее заметное, так как степень связи между
отсчетами сигнала наиболее слабая.
На первом графике значения YiиYi+1 сильно коррелированны, поэтому, зная значение Yi ,можно предсказывать среднее значение Yi+1 . Чем больше τ, тем меньше становится степень коррелированности значений, и, следовательно, прогнозировать значения Yi+τ становится гораздо сложнее.
5.Определение оценки автокорреляционной функции выходного сигнала при входном сигнале из п. 1., используя функцию xcorr() с параметром ‘biased’ (смещенная оценка). Построение на одной фигуре графиков АКФ, полученных в п. 2 и в п. 5. С помощью этой же функции определение и построение графиков взаимной корреляционной функции выходного и входного сигналов фильтра.
X=randn(1,500);
h=[25 20 -6 -4 1];
x=xcorr(X,'biased');
y=conv(h,x);
subplot(2,1,1)
plot(y)
title('Correlation function')
axis([0,1000,-10,50])
f=xcorr(X,'biased');
subplot(2,1,2)
plot(f)
axis([0,1000,-0.5,1.5])
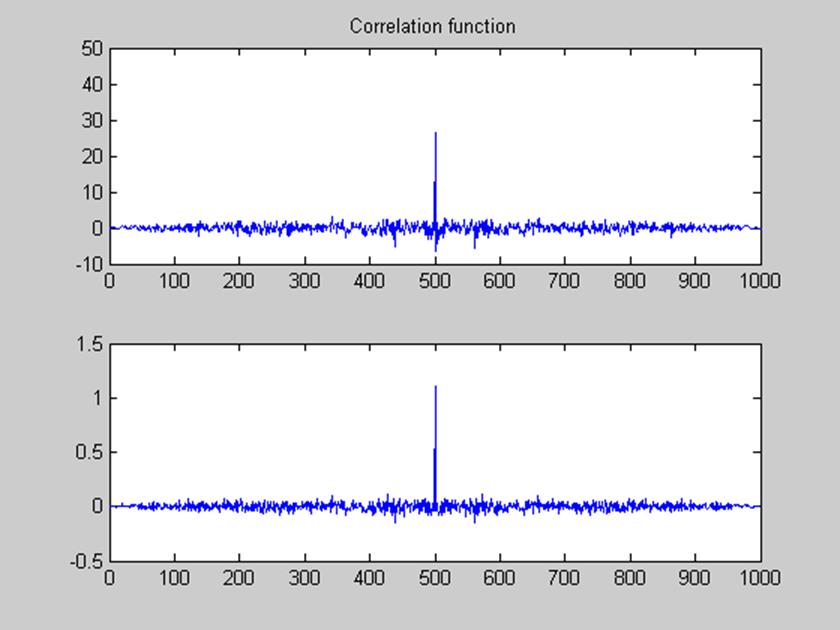
Рис. 5. Графики АКФ выходного сигнала из пункта 3 и пункта 5 соответственно.
X=randn(1,500);
num=[0.8 1 0.4];
den=[1];
f=filter(num,den,X);
z=xcorr(f,X);
plot(z)
title('ВКФ выходного и входного cигнала для системы')
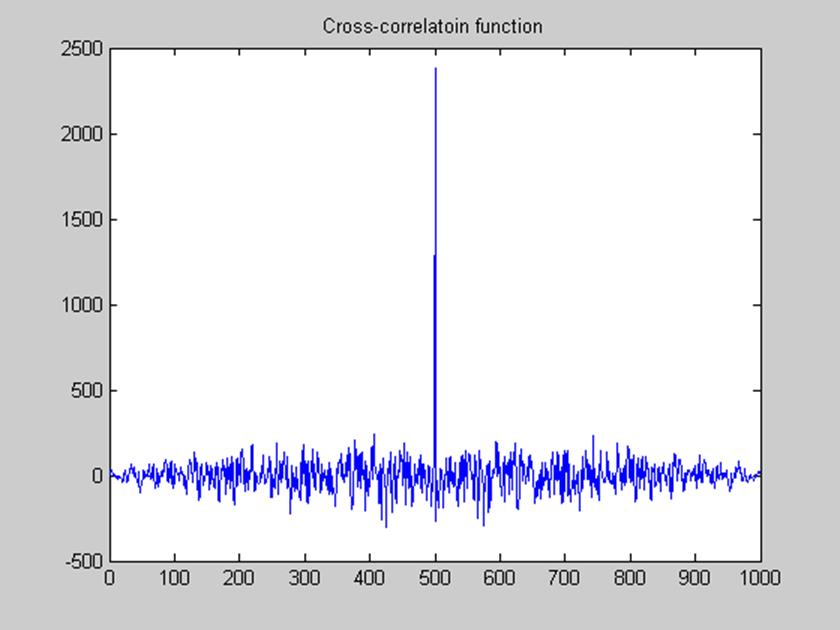
Рис. 6. Взаимная корреляционная функция входного и выходного сигналов.
Если АКФ показывает степень сходства между сдвинутыми копиями одного и того же сигнала, то взаимная корреляционная функция позволяет определить аналогичную величину для сдвинутых экземпляров двух разных сигналов, являясь, таким образом, характеристикой связи двух случайных сигналов.
ВКФ определяется выражением:
![]()
6. Генерация случайного гауссовского сигнала с нулевым средним значением и дисперсией, равной 1, длительностью 1000 отсчетов. Определение частотой характеристики фильтра. Гауссовский сигнал рассматривается как входной сигнал фильтра. Построение на одной фигуре графиков АЧХ фильтра, спектральной плотности мощности входного и выходного сигналов.
>> sig=random('norm',0,1,1,1000);
>> plot(sig)
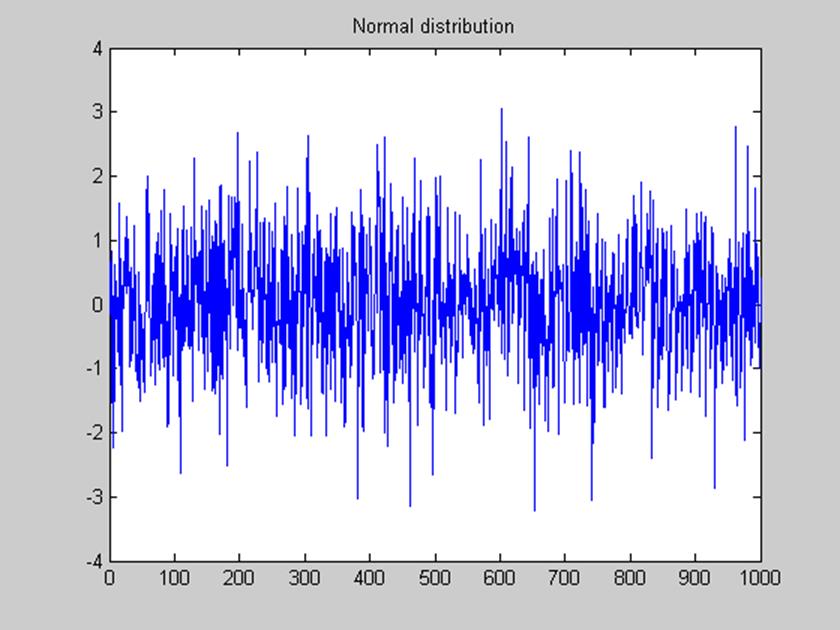
Рис. 7. Гауссовский случайный сигнал с нулевым средним значением и
дисперсией, равной 1, длительностью 1000 отсчетов.
Определение частотной характеристики фильтра:
![]()
% Формирование частотной шкалы
% и построение частотной характеристики фильтра
Ts=0.01; T=10; % интервал отсчетов и длительность сигнала
df=1/T; Fmax=1/Ts;
f=0:df:Fmax/2; % частотная шкала
d1=length(f);
% Частотная характеристика фильтра
H=2./(1+0.9*exp(-j*2*pi*f*Ts)+0.6*exp(-j*4*pi*f*Ts));
X=randn(1,500);
num=[3 -0.9 -0.6];
den=[1];
figure(1)
subplot(3,1,1), plot(f,abs(H))
title('Magnitude response')
% Вычисление и построение спектра мощности входного шума
t=0:Ts:T;
X=random('norm',0,1,1,1000); % Генерирование входного шума
[Sxx, f1]=psd(X,d1, Fmax); % Вычисление спектра мощности входа
subplot(3,1,2), stem(f1,Sxx), axis([0,50,0,30])
title('Spectrum to powers of the input signal')
% Вычисление и построение спектра мощности выхода
i=3:length(X);
Y=zeros(1, length(X));
% Формирование выходного сигнала фильтра
num=[3];
den=[1 0.9 0.6];
Y=filter(num,den,X);
[Syy, f2]=psd(Y,d1,Fmax); % Спектр мощности выхода
subplot(3,1,3), stem(f2,Syy), axis([0,50,0,1100])
title('Spectrum to powers of the output signal')
xlabel(' Frequency, Hz')
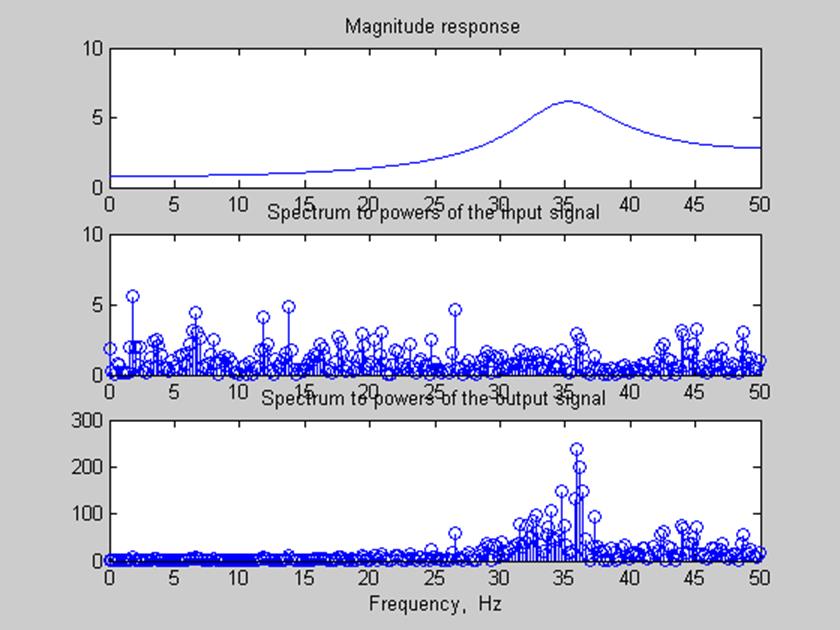
Рис. 8. АЧХ фильтра, спектр мощности входящего сигнала, спектр
мощности сигнала на выходе фильтра.
Вывод:
Мощность выходного сигнала в полосе пропускания зависит от коэффициента передачи фильтра. Мощность пропорциональна квадрату коэффициента передачи фильтра. Если уменьшить коэффициент передачи, то естественно, что, мощность выходного сигнала станет меньше, что и видно из представленных графиков.
Из графика видно, что после прохождения через фильтр мощность сигнала в полосе задерживания уменьшилась, а в полосе пропускания увеличилась.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.