5. Фильтрация суммы гармоник с помощью функции filter().
С помощью следующей последовательности команд сгенерируем сигнал, равный сумме гармоник с частотами 50 Гц и 2000 Гц, и осуществим фильтрацию данного сигнала с помощью функции filter().
num = [1.1 -2.2 1.1];
den = [1 –1.865 0.867];
n = 0: 0.00001: 0.04;
x = cos(2*pi*2000*n) + cos(2*pi*50*n);
y = filter(num, den, x);
subplot(2,1,1);
plot(n, x);
set(gca,'FontName', 'Times New Roman Cyr', 'FontSize', 10)
title('Исходная сумма гармоник');
subplot(2,1,2);
plot(n, y);
set(gca,'FontName', 'Times New Roman Cyr', 'FontSize', 10)
title('Отфильтрованный сигнал');
Полученный результат представлен на рис. 6.
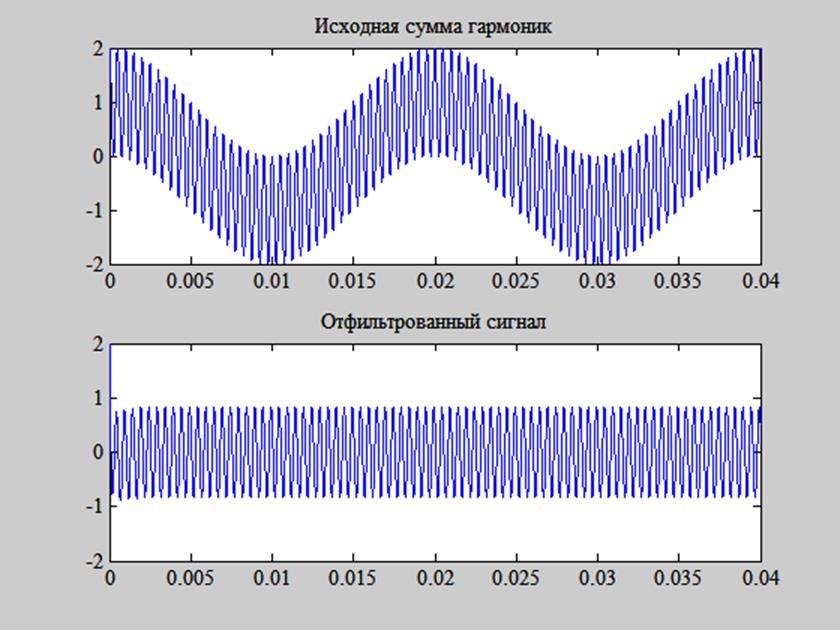
Рис. 6. Графики исходного и отфильтрованного сигналов.
На рис. 6 видим, что сигнал частотой 50 Гц, присутствовавший в исходной сумме, был подавлен в результате фильтрации, а сигнал 2000 Гц остался практически неизменным.
Данный результат соответствует ожидаемому, т.к. по виду АЧХ фильтра (рис. 5) видно, что частота 50 Гц находится в полосе задерживания фильтра, а частота 2000 Гц – в полосе пропускания.
Аналогичный результат можно получить, заменив функцию filter() на функцию dlsim() с синтаксисом:
y = dlsim(num, den, x);
6. Исследование влияния расположения нулей и полюсов на частотную характеристику системы.
Для исследования влияния расположения нулей и полюсов на частотную характеристику системы выберем два новых набора нулей и полюсов и построим АЧХ системы для этих наборов.
1) Нули: ![]() ,
, ![]() .
Полюса:
.
Полюса: ![]() ,
, ![]() .
.
С помощью следующей последовательности команд зададим значения нулей и полюсов и построим диаграмму.
Z = [1; 0.4];
P = [0.5; 0.3];
K = 1;
figure(1)
zplane(Z, P)
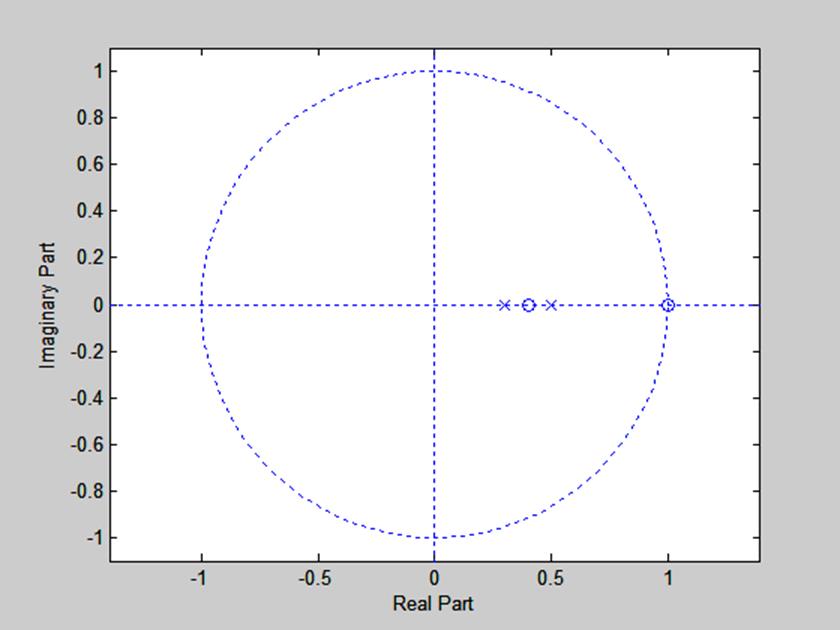
Рис. 7. Диаграмма нулей и полюсов.
Для полюсно-нулевого представления частотной характеристики системы можно записать выражение АЧХ в виде (15).
 (15)
(15)
Каждый член в числителе и
знаменателе выражения (15) имеет вид ![]() ,
где
,
где ![]() - нуль или полюс.
- нуль или полюс.
В z
- плоскости разность ![]() представляет собой вектор,
начинающийся в точке
представляет собой вектор,
начинающийся в точке ![]() и заканчивающийся на
единичной окружности в точке
и заканчивающийся на
единичной окружности в точке ![]() для определенной
частоты ω. При изменении ω изменяется длина векторов
для определенной
частоты ω. При изменении ω изменяется длина векторов ![]() , значит, изменяется значение АЧХ на
данной частоте и это значение можно вычислить, зная расположение нулей и
полюсов системы.
, значит, изменяется значение АЧХ на
данной частоте и это значение можно вычислить, зная расположение нулей и
полюсов системы.
Вычислим значения АЧХ при некоторых значениях частоты.
![]() ,
, ![]()
 ,
, 

![]() ,
, 
Построим эскиз АЧХ.
 |
Рис. 8. Эскиз АЧХ системы.
С помощью следующей последовательности команд преобразуем полюсно-нулевое представление системы в передаточную функцию и построим график АЧХ системы.
[num,den] = ZP2TF(Z,P,K)
figure(2)
[H,F] = FREQZ(num,den,100000,10^4);
plot(F, abs(H))
set(gca,'FontName', 'Times New Roman Cyr', 'FontSize', 10)
title('АЧХ цифрового фильтра');
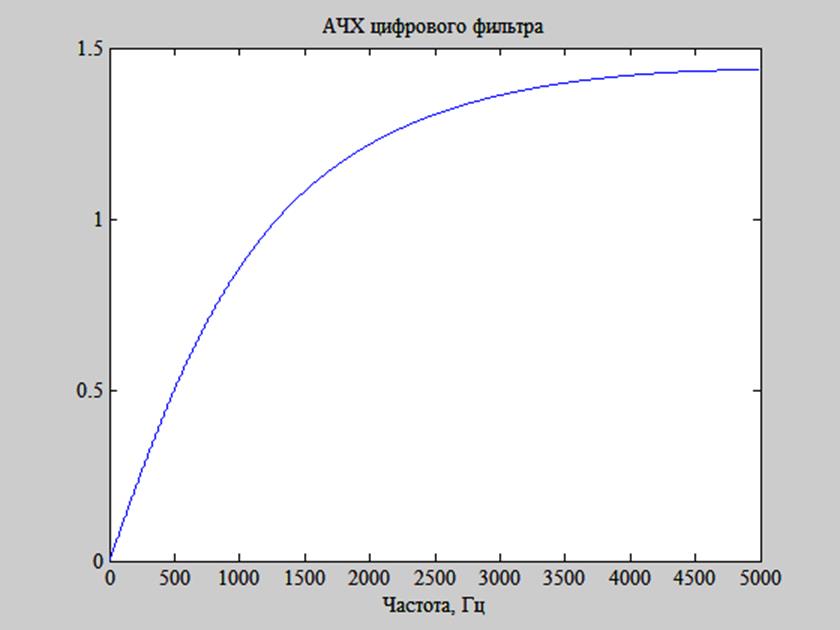
Рис. 9. АЧХ системы.
Сравнив АЧХ системы (рис. 9) с эскизом АЧХ (рис. 8) видим, что они имеют схожий вид и в точках, где значение АЧХ было вычислено исходя из расположения полюсов и нулей, эти значения совпадают с истинными. Значит, АЧХ системы можно построить, зная расположение её нулей и полюсов.
2) Нули: ![]() ,
, ![]() .
Полюса:
.
Полюса: ![]() ,
, ![]() .
.
С помощью следующей последовательности команд зададим значения нулей и полюсов и построим диаграмму.
Z = [0.4 + 0.7*j; 0.4 - 0.7*j];
P = [0.9; 0.4];
K = 1;
figure(1)
zplane(Z, P)
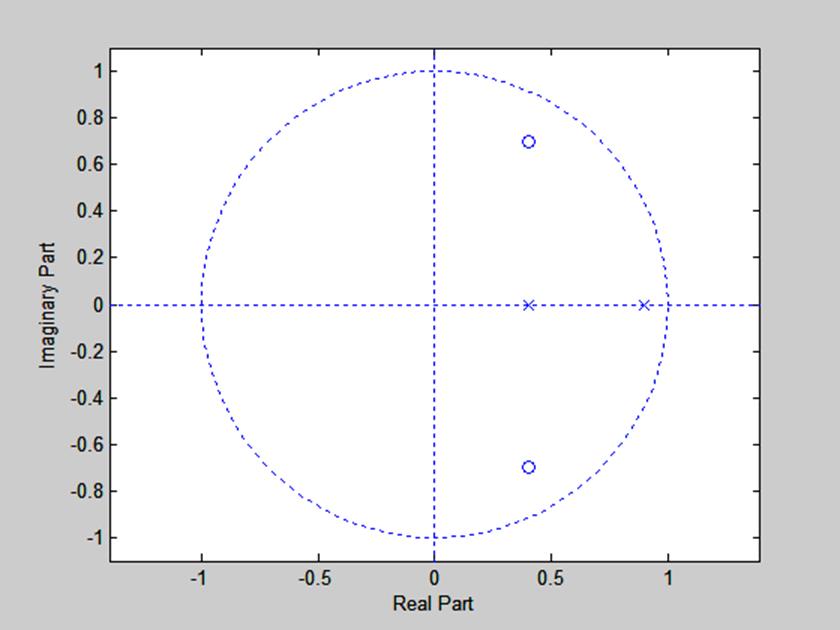
Рис. 10. Диаграмма нулей и полюсов.
Вычислим значения АЧХ при некоторых значениях частоты.
![]() ,
, ![]()
, 
![]() ,
, 
Построим эскиз АЧХ.
 |
Рис. 11. Эскиз АЧХ системы.
С помощью следующей последовательности команд преобразуем полюсно-нулевое представление системы в передаточную функцию и построим график АЧХ системы.
[num,den] = ZP2TF(Z,P,K)
figure(2)
[H,F] = FREQZ(num,den,100000,10^4);
plot(F, abs(H))
set(gca,'FontName', 'Times New Roman Cyr', 'FontSize', 10)
title('АЧХ цифрового фильтра');
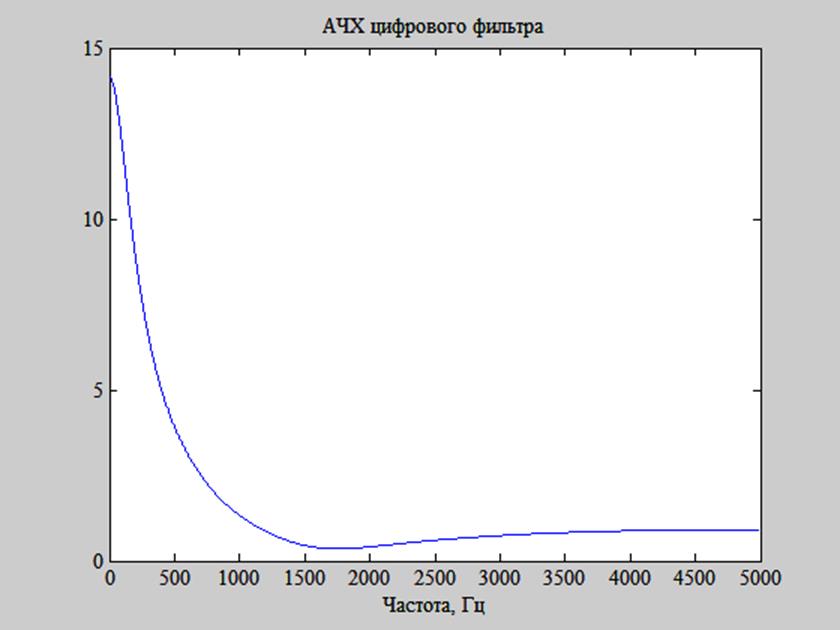
Рис. 12. АЧХ системы.
Сравнив АЧХ системы (рис. 12) с эскизом АЧХ (рис. 11) видим, что они имеют схожий вид и в точках, где значение АЧХ было вычислено исходя из расположения полюсов и нулей, эти значения совпадают с истинными. Значит, АЧХ системы можно построить, зная расположение её нулей и полюсов.
7. Определение импульсной характеристики системы с помощью функций impz() и dimpulse().
C помощью следующей последовательности команд построим графики импульсной характеристики системы, используя функции impz() и dimpulse().
num = [1.1 -2.2 1.1];
den = [1 –1.865 0.867];
figure(1)
[H,T] = IMPZ(num,den, 100);
stem(T, H)
set(gca,'FontName', 'Times New Roman Cyr', 'FontSize', 10)
title('Импульсная характеристика');
xlabel('n');
figure(2)
dimpulse(num, den, 100)
Полученные результаты представлены на рис. 13 и 14.
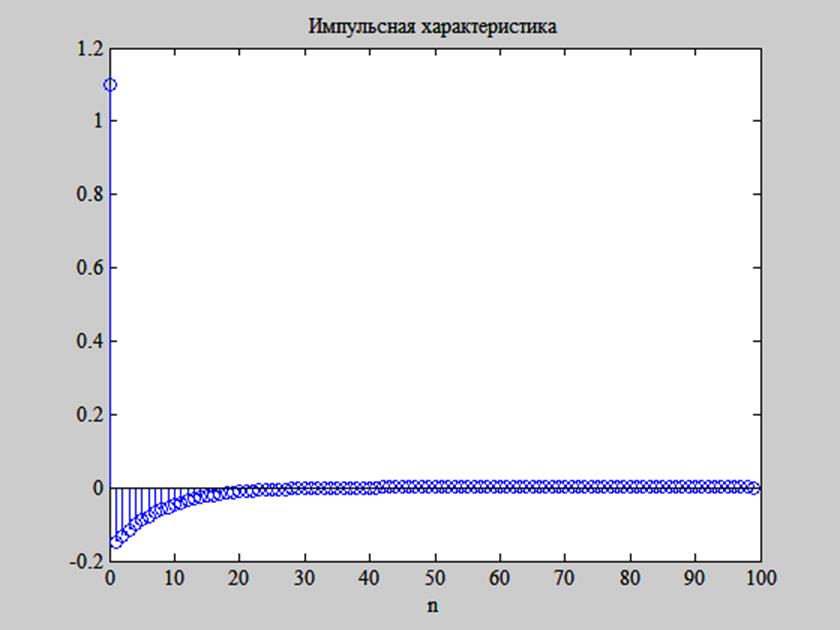
Рис. 13. Импульсная характеристика системы, найденная с помощью impz().
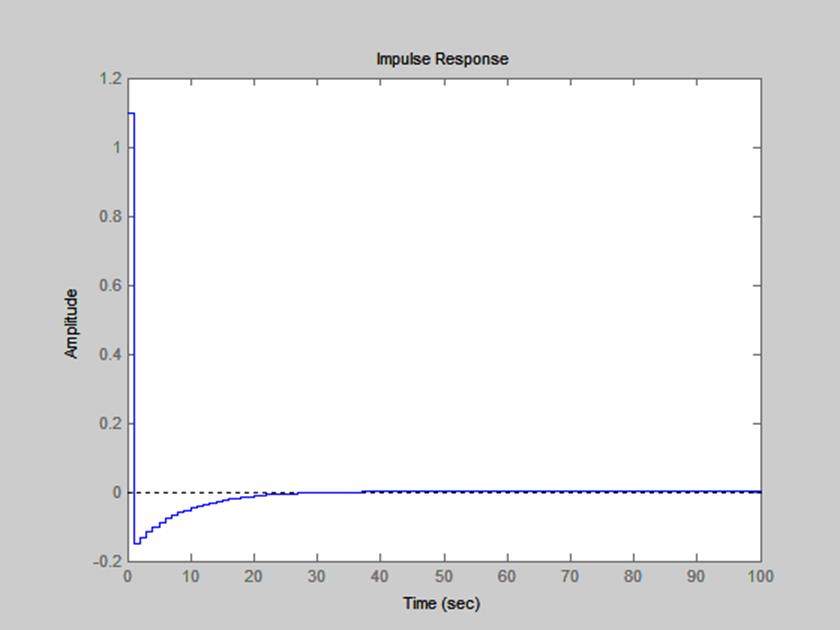
Рис. 14. Импульсная характеристика системы, найденная с помощью dimpulse().
Сравнив графики, изображённые на рис. 13 и 14, с графиком импульсной характеристики, определённой аналитически как обратное Z – преобразование от передаточной функции системы (рис. 3), видим, что все три графика практически одинаковы.
8. Построение графика переходной характеристики фильтра с помощью функции dstep().
C помощью следующей последовательности команд построим график переходной характеристики системы, воспользовавшись функцией dstep().
num = [1.1 -2.2 1.1];
den = [1 –1.865 0.867];
dstep(num, den, 100)
Полученный результат представлен на рис. 15.
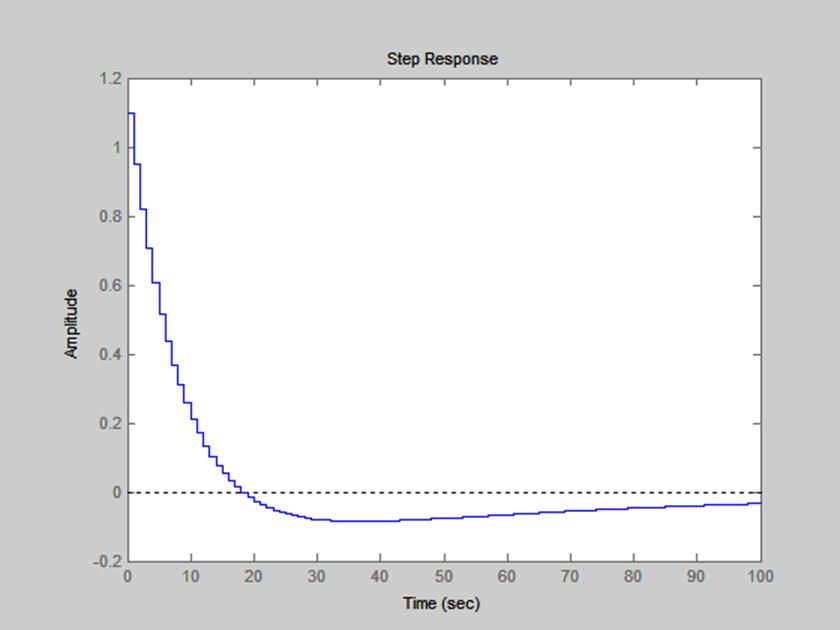
Рис. 15. Переходная характеристика системы, найденная с помощью dstep().
Выводы:
1. Дискретные линейные стационарные системы описываются линейными разностными уравнениями с постоянными коэффициентами.
Разностное уравнение, описывающее дискретную систему можно получить из дифференциального уравнения, задающего аналоговую систему, с помощью процедуры дискретизации. Такая процедура была проведена в п.1.
2. Характеристикой систем в области переменной z является передаточная функция, которая определяется как отношение Z - преобразований выходного и входного сигналов.
3. Импульсной
характеристикой системы является выходной сигнал системы при подаче на её вход
функции ![]() . Также импульсную характеристику
можно получить как обратное Z – преобразование
передаточной функции системы (п.2).
. Также импульсную характеристику
можно получить как обратное Z – преобразование
передаточной функции системы (п.2).
В Matlab для определения импульсной характеристики используются функции impz() и dimpulse(). В п.7 было показано, что определение импульсной характеристики с помощью этих функций и аналитически даёт одинаковые результаты.
4. В п.3 было
показано, что передаточная функция системы с точностью до константы ![]() определяется расположением нулей и
полюсов в z- плоскости.
определяется расположением нулей и
полюсов в z- плоскости.
5. Изменение амплитуды гармоники при прохождении через систему характеризуется АЧХ, а фазы – ФЧХ. Для расчёта ЧХ дискретных систем в Matlab используется функция freqz().
6. Для действительной
гармоники ![]() выходной сигнал
выходной сигнал![]() . В п.5 данное утверждение было
проиллюстрировано: гармоника с частотой из полосы задерживания не попала в
выходной сигнал, т.к. значение АЧХ на данной частоте мало.
. В п.5 данное утверждение было
проиллюстрировано: гармоника с частотой из полосы задерживания не попала в
выходной сигнал, т.к. значение АЧХ на данной частоте мало.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.